详解动力电池组均衡设计原理及意义
引言
随着电池作为电源使用而日益受到欢迎,又出现了一种同样强劲的需求,即最大限度地延长电池的使用寿命。电池不平衡 (即组成一个电池组的各节电池的充电状态失配) 在大型锂离子电池组中是个问题,这个问题是由制造工艺、工作条件和电池老化的差异造成的。不平衡可能降低电池组的总容量,并有可能损坏电池组。不平衡使电池从充电状态到放电状态都无法跟踪,而且如果没有密切监视,可能导致电池过度充电或过度放电,这将永久性地损坏电池。电池制造商按照容量和内部电阻对混合电动型汽车以及电动型汽车电池组中使用的电池进行分类,以在交付给客户的特定批次中,减少电池之间的差异。然后,再仔细挑选电池来构成汽车电池组,以改善电池组中每两节电池之间的匹配。理论上,这应该能防止电池组中产生大量的不平衡,但是尽管如此,普遍的共识是,当构成大型电池组时,既需要电池监视、又需要电池平衡,以在电池组寿命期内保持大的电池容量。
要理解平衡的重要性,第一步是利用两个相同的电池组来评估两种基本的电池管理策略。该测试将探究,在电池寿命期内,电池组的总容量是怎样受到影响的。为了评估这两种策略,要设计一个电池监视系统 (BMS)。该电池监视系统由 3 个部分组成:监视硬件、平衡硬件和控制器。用在测试中的电池监视系统能监视电池电压和电池负载电流、平衡电池,并能控制电池与负载及电池充电器的连接。
监视硬件
一个简单的电池监视器和平衡系统如图 1 所示。该电池监视系统的硬件是围绕高度集成的 LTC6803-1 多节电池监视 IC 设计的。每个 LTC6803-1 能测量多达 12 节电池,并允许以可连接多个 IC 的串行菊花链形式连接,从而使一个系统能通过一个串行端口监视超过 100 个电池。当设计一个电池监视系统时,某些规范应当给以特殊考虑,首先是电池电压准确度。当试图决定单个电池的充电状态时,电池电压的准确度至关重要,而且一节电池能否在接近工作极限的条件下工作,电池电压的准确度是限制因素之一。LTC6803 具 1.5mV 的分辨率,准确度为 4.3mV。这将允许该控制器就电池状态做出准确决策,而不论使用的是什么样的电池化学组成。其次,电池组不平衡的一个主要来源是,电池监视电路本身的电源和备用电流的差异。在汽车应用中,备用电流尤其重要,因为大多数汽车在大部分时间里都是熄火的,这时电池监视系统处于备用模式。LTC6803 仅具 12uA 备用电流,电流范围规定为 6uA 至 18uA,从而可保证在一个大型电池组中,最严重的不平衡为 12uA,这使每月不平衡低于 10mAhr。有两个 ADC 输入可用来监视电池温度或其他的传感器数据。图 1 中显示的设计用 Vtemp1 输入测量电池电流。电流用 LT1999 测量。LT1999 是一款高压双向电流检测放大器,具 -5V 至 80V 的输入范围,而且在本文所述测试情况下,设置为监视电池组高压端的 ±10A。LTC6803 上的两个 GPIO 引脚用来控制一个有源负载和一个充电器。当充电结束或达到放电点时,这允许 LTC6803 断开电池与充电器或负载的连接。
图 1:6 节电池监视系统的简化原理图。LTC6803 测量电池电压并
控制外部电池放电晶体管。LT1999 测量至电池组的充电和放电电流。
平衡硬件
利用跨电池组中每一节电池的旁路电阻器和开关实现无源平衡硬件。平衡电阻器的使用一般采用两种方式之一 (图 2)。电阻器可用来导引充电电流绕过电池,以便具较低充电状态 (SOC) 的电池能以较高的速率保持充电,而不会使具有高 SOC 的电池有过充电和损坏的风险。该电阻器也可用来使具较高充电状态的电池泄放过多的电荷,以使这些电池与具较低 SOC 的电池实现均衡。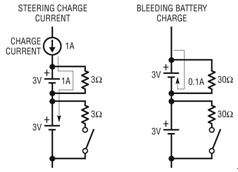
图 2:无源电池平衡的两种选择。电阻值决定主要功能
硬件设计的主要关注之处是确定合适的平衡电流,该电流由所用旁路电阻器的值设定。所需的平衡电流大部分取决于电池的容量、可允许的平衡时间、预期的不平衡程度以及电阻器将怎样使用。如果电阻器用来旁路充电器的电流,那么它将设定为分流几个安培的电流。如果平衡电阻器用来泄放过多的电荷,那么该电阻器的大小要满足所希望的平衡时间。无源平衡仅能纠正源自电池组加载的 SOC 不平衡,而电池组加载则是由电池监视电路、电池本身放电以及内部电阻效应引起的。如果持续监视,那么这些 SOC 不平衡的来源每天应该仅产生少量的不平衡。用于这次实验室评估的电池监视系统采用了一个 33Ω 的平衡电阻器,该电阻器设定大约 100mA 的平衡电流,就小型电池而言,这一平衡电流很大,但是这样的平衡电流允许平衡操作用更短的时间来完成。
- 电动车锂电池液体冷却方法推荐(10-03)
- 电动汽车的充电模式(11-01)
- 详察电池芯的电池组监控IC(06-15)
- 有源电池平衡技术帮助增加大型锂离子电池组供电能力(07-01)
- 动力电池组测试平台设计(08-01)
- 基于ATmega16的电动车锂电池组设计(10-10)