基于加速度的车祸报警系统的设计与实现
随着汽车行业的发展,车祸也在频繁发生,根据公安部交通管理局发布的2009年全国道路交通事故情况显示,2009年,全国共发生道路交通事故238 351起,造成67 759人死亡、275125人受伤,直接财产损失9.1亿元。所以,在我国减少交通事故、挽救人身财产安全已是迫在眉睫。
我国卫生部提供的一份资料表明:在1000例交通事故伤害者中。只有14.3%是乘救护车到达医院。另外,在我国车祸死亡者中只有大约40%是当场死亡,60%的人死于医院或者送往医院途中,其中约30%的受伤者因为抢救不及时而死亡。因此。如果能减少抢救时间,及时得到救助,将能在很大程度上减少伤亡。而很多时候车上人员在发生车祸时不知道自己具体的位置,或者是已失去的报警能力无法及时与救援部门联系,耽误了最佳的救援时间,从而导致伤害的增大。
基于加速度的车祸报警系统即当发生车祸之后,该系统能能立即让监控中心获得车祸信息,并指引救援人员到达事故现场,及时展开救援工作,以达到尽量减少事故人员伤亡的目的。事实证明,国外将电子技术、无线电通讯技术应用于交通事故的自动呼救,可有效减少事故人员伤亡。
1 技术介绍
1.1 GPS定位
GPS系统由环绕地球运行的GPS卫星组成,使得地面任一点都能观测到4颗以上的卫星,GPS信号接收机能够捕获到按一定卫星截止角所选择的待测卫星,并跟踪这些卫星的运行。当接收机捕获到跟踪的卫星信号后,就可测量出接收天线至卫星的伪距离和距离的变化率,解调出卫星轨道参数等数据。根据这些数据计算出用户所在地理位置的经纬度、高度、速度、时间等信息。
1.2 GSM通信
GSM是一种广泛应用于全世界的数字移动电话系统。GSM是目前3种数字无线电话技术(TDMA、GSM和CDMA)中使用最为广泛的一种。用户遍布140多个国家。许多GSM网络拥有漫游协议,因此当到其他国家或地区之后,仍然可以继续使用GSM通信。
2 车祸判断
我国的汽车正面碰撞标准GB11551-2003《乘用车正面碰撞的乘员保护》是非等效采用ECE R94法规制定的。我国的法规要求是速度50 km/h下的100%正面碰撞,100%正面碰撞的意思就是,车辆正面完全撞在障碍物上,车头的受力面为100%。表1为我国汽车制定主要测试项目,可见碰撞测试时速为50 km/h时要求汽车气囊必须自动打开,说明汽车在50 km/h以下的速度发生碰撞还是比较安全的,而50 km/h以上的速度发生碰撞是很危险的。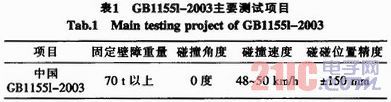
汽车在发生车祸碰撞时持续变形时间一般为40~80 ms,并随碰撞相对速度增加,碰撞持续时间逐渐减少。碰撞速度与时间的关系如表2所示。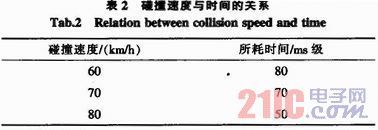
根据公式: 
得到碰撞速度与加速度的关系如表3所示。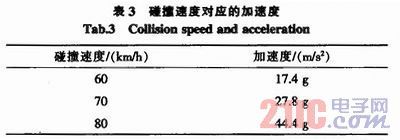
从表3可以看出碰撞速度越大加速度越大。因此车上人员受伤的可能性就更大。从加速度对应的速度60 km/h、70 km/h、80 km/h关系可以近似: 
得50 km/h碰撞的近似加速度为11 g,即当加速度达到11 g时足已证明发生了汽车严重的碰撞事故,很大机率能让司乘人员受伤,甚至失去生命,所以应该立刻自动发出车祸报警。
3 系统组成和原理
3.1 总系统组成
系统由车载终端、GPS卫星、系统服务器、Intemet网络、网络客户端、手持电话等组成。如图1所示。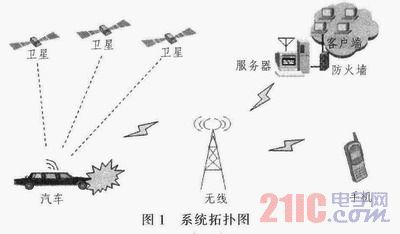
3.2 车载终端
车载终端以ATmega128L为核心,集成了加速度传感器、键盘、LCD屏、GSM模块、GPS模块、复位电路、蓄电池、扩展I/O日等,可检测水平方向和坚直方向的加速度,检测坚直方向的加速度只是为了防止由于重力加速度的干扰而产生误报警,车载终端结构图如图2所示。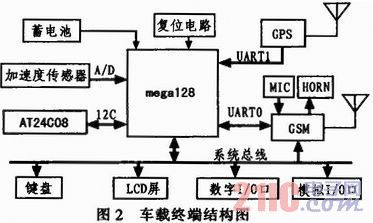
3.2.1 加速度采集
采用的ADI公司的加速度传感器ADXL001-500BEZ振动与冲击传感器,其测量范围在-500~+500 G之间,该传感器具有0.2%满量程范围的出色非线性度,具有宽带宽(谐振频率22 kHz),可工作在-40~+125°,适合苛刻的工业环境且无需校准。十分适合系统的需求。
3.2.2 车辆定位
车辆定位采用了HOLUX GR-85智能型卫星接收模块,他采用GSC3F卫星定位接收芯片,确保了高的接收灵敏度,内部有可充电电池,可以保存星历数据,便于快速定位,是一个具备全方位功能的卫星定位接收器。串口数据输出,默认波特率为4 800,每秒更新一次GPS全数据。把TXA脚和系统mega128单片机串口的RXD脚连接,终端即可得到所需要的年/月/日/时/分/秒/毫秒、当前经度、纬度、运动速度、运动方向等数据。
3.3 系统实现
图3是车载终端主程序流程图,终端上电后初始化串口0、串口1、从EEPROM中读取设置通讯号码等信息。通过A/D不断的采集系统的加速度输入MCU,MCU将不断的保存获得的加速度,并进行算法判断是否应发出报警。系统会每秒产生一个低级中断读
- 基于GSM的GPS车辆定位监控系统(上)(11-30)
- 基于GSM的GPS车辆定位监控系统(下)(11-30)
- 另类传感器观念:汽车传感器(3)(11-30)
- 基于GPRS网络的GPS图形导航仪(上)(01-08)
- 基于GPRS网络的GPS图形导航仪(下)(01-08)
- 卫星定位与导航技术(01-23)