智能小车多功能传感器模块的设计
0 引言
智能车是行动模式最简单的机器人之一。在军事、救援、生产、生活中都有广泛的应用。更是受到众多电子类竞赛的青睐。如全国大学生电子竞赛、飞思卡尔智能车大赛等。比赛中的思路及创新对实际应用的发展也起着重要作用。
1 方案论证
在竞赛中,我们用过几种寻迹传感器的方案。但各有优劣。
方案1:采用555集成芯片,组成触发器电路。TCRT5000光电传感器采集到的信号转换成一定电压,经触发器转变成标准的电平输入。这样单片机不会造成逻辑混乱。此方案优点是抗干扰能力强。但由于每个光电对管要配一组555电路。所以成本非常高,并且也给PCB布板增加了难度。
方案2:采用集成运放构成电压比较器,同样将光电传感器采集到的信号转换成数字信号供单片机处理。此方案与方案1比较成本有所降低。但由于集成运放芯片大多只包含二到四个内部放大器。对于需要多个光电传感器的寻迹受到了限制。
方案3:采用最简单的三极管开关电路构成电平转换电路。此方案成本最低,扩展方便。而且此电路可以用引线连接不同的光电传感器,将智能车要完成的其它功能结合在一起。
比较后,本设计选取方案3构成一款多功能的传感器模块。
2 原理设计
在小车中应用的传感器,无论是寻迹、检测路程还是避障都可以应用红外线实现。只是应用的传感器形状和原理略有不同。寻迹和避障要用反射式。而检测路程要用直接接收式。我们可以用U形槽状的光电传感器。令传动齿轮通过凹槽,齿轮上开一孔。每当该孔通过槽体,槽体一侧发射管的红外线将无阻挡地射到接收管上,产生一脉冲信号。根据产生信号的次数,还有齿轮一周与车行进路程的关系,便可用程序计算出小车行驶的路程。
几种传感器虽接通方式不同,但它们接收到信号后,都要经过同样的处理过程。那就是把一个变化的不稳的电压转换成一相对稳定的电平信号。正因如此,我们可以把这三种传感器的处理电路做在同一块板上,此块板主要作寻迹模块,寻迹用的光电传感器都可布在上面。检测路程和避障则可留出插针,用杜邦线连接,置于任何位置。功能框图如下: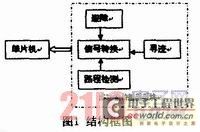
3 电路设计
具体电路设计见图2。以图左半部分为例,当TCRT5000下面无黑线时,红外线能正常反射,接收管可以接收到信号并导通,此时NPN三极管导通,指示灯亮并向单片机提供高电平。反之当光电传感器下面有黑线时,NPN三极管关断,单片机得到低电平信号。通过调节102的可调电阻,可以调整发射强度,下面100Ω电阻作为防烧毁的限流电阻。这是一张简化的原理图,图中左半部的电路同样可以视需要的寻迹器个数扩展任意多个。本设计用五只TRCT5000来寻迹,对应输给单片机插口的7-3号脚,这样可分别接避障模块和路程检测模块。
图3为单面布板参考图。
4 注意事项
调节可调电阻可以改变发射强度,使得传感器在一定高度时也可以得到反射信号。曾经试过在某一个高度时有的指示灯亮,有的指示的不亮。由于光电传感器的个体差异导致这样的情况是可能的。调节电阻使指示灯发光即可。另外这类传感器模块加装指示灯是十分必要的。这样既可以显示出当前黑线的位置状态,又可以在反射面比较差的条件下了解是不是有个别传感器不起作用。
另外,在使用该模块的时候除了注意传感器距离反射面的高度,还要注意模块中光电传感器的排列样式。本设计采用一字型。也有采用菱形、M字形的。根据具体赛道加以分析。
反射面的形态对这类传感器绝对是个大的考验。曾经有这样的惨痛经历:智能车在制作和调试的过程中,都是在地砖上粘上黑色胶带来完成的,结果测试时场地是白纸粘上胶带,这样造成了小车一些传感器的不适应,导致测试失败。所以在制作阶段就要按组委会标准仿制场地。
5 结束语
智能车在电子竞赛中的意义不仅在于它的精彩纷呈,竞赛的思路和方案更可以用于生产和生活中。如一些管道机器人、救援机器人、图书馆或办公室资料自动运送车等。因此,比赛中的经验值得总结并加以应用。本设计就是比较了几次参赛方案后所选,具有一定的应用价值。
- 基于16位单片机MC9S12DG128的智能车控制系统设计与实现(11-11)
- 基于9S12DG128的智能车控制系统设计与实现(08-27)
- 数字CMOS摄像头在智能车中的应用(08-29)
- 基于电磁场检测的寻线智能车设计(09-22)
- 基于载流导线循迹智能车的数学模型(10-12)
- 一种非均匀行采集的智能车路径识别算法(10-22)