基于声光探测的汽车定位系统
汽车定位系统用于检测汽车停车位置参数和车箱几何参数,为机械手在车箱范围内作业提供平面坐标数据,是车载货物自动作业控制系统的组成部分。目前的汽车定位系统多用齿轮传动的机械移位红外线扫描方式或基于视频图像的人工画界方式,前者定位速度慢,后者定位精度低,可靠性差,都难以满足实际定位对速度、精度和可靠性的要求。文中采用红外线电子移位逐行高速扫描技术和超声波测距技术实现汽车定位,具有可调定位速度和适应恶劣天气的能力,还采用多种措施,提高系统的抗干扰能力和可维护性能,实现了快速、高精度、高可靠定位的目标。利用Delphi开发主控软件,实现数据处理,完成定位结果的显示、输出,工作参数设置和状态检测,具有良好的开放性,方便与各种控制系统接口。
1 工作原理和系统组成
1.1 工作原理
以透射式红外光电传感器和超声波测距装置相结合可实现对平面区域内物体的定位。透射式红外光电传感器由红外发射模块和红外接收模块组成,当收发模块之间有物体遮挡光路时,将改变接收模块的接收状态,据此可非接触探测物体是否存在。
如果把多个发射模块和多个接收模块按固定间隔平行排列成两排,让收发两侧对应位置上的红外模块一对一对地按顺序轮流接通工作,对其间区域进行逐行扫描探测,则依据扫描结果不但可判断该区域是否有物体存在,还可计算出物体的长度及其在该区域中的纵向相对位置。
超声波测距通常采用渡越时间法,收发头与被测物体之间的距离:
式中,v为超声波在介质中的传播速度;t为超声波的往返时间间隔。分别在物体两侧标定位置安装超声波测距装置,测出与物体的距离,就可计算出物体的宽度及其在该区域中的横向相对位置。
1.2 系统组成
图1为基于声光探测的汽车定位系统的组成。
图中单片机1、红外发射阵列、红外接收阵列和电子移位电路构成红外线电子移位逐行扫描电路,用于车箱长度和纵向停车位置的测量。单片机2和4个超声波测距装置构成的测距系统,用于车箱宽度和横向停车位置的测量。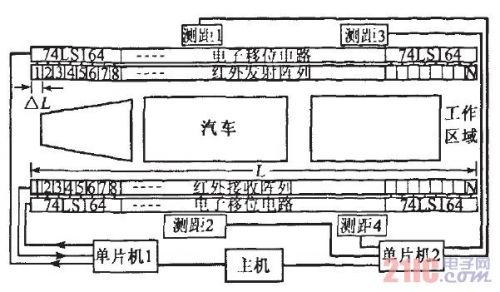
图1 系统组成
其中红外发射阵列和红外接收阵列安装于工作区域两侧车箱中部的高度,分别由N个发射模块和N个接收模块组成,它们均匀平行排列,收发一一对应。4个超声波测距装置安装在工作区域两侧,分成两组,分别测量前部车箱和后部车箱。
主机对纵向检测和横向检测的数据进行综合处理和分析,判断出工作区是否有车、哪种车型,并计算出汽车在区域中的停车位置参数和车箱几何参数。
2 红外线电子移位逐行扫描电路设计和调试
2.1 电路设计
图2为红外线电子移位逐行扫描电路。图中只画出一对红外发射和接收模块的电路,并略去脉冲发生器电路。脉冲发生器产生38 kHz的振荡信号,经过低频脉冲调制后,送入发射模块。红外发射模块的电子开关在控制信号为高电平时导通,把脉冲发生器送来的信号发射出去;红外接收模块的电子开关也在控制信号为高电平时导通,把红外接收头的接收状态输出,送至单片机1。电子移位电路由74LSl64串联组成,有N个输出端子,每一个输出端子控制一个红外模块。开关信号是一个高电平脉冲,每个移位时钟周期向前移动一位。由于收发两侧移位时钟同步,所以,收发两侧对应位置上的红外模块会一对一对地按顺序轮流接通工作,由此达到电子移位逐行扫描的目的。
图2
2.2 扫描速度和精度处理
扫描速度主要取决于移位时钟的周期出,完成一次扫描的时间:
该电路中在△f≥2 ms时,具有良好的接收可靠性。单片机l通过程序控制,可使△t一2~10 ms,以满足不同扫描速度的需要。
红外阵列中,相邻模块间距△Z就是纵向的最高定位精度。根据工作区域的纵向最大长度L的要求确定红外阵列中模块数量N,要求N×A/=L。
由于红外阵列由N个功能相同的红外模块串联而成,所以在制作时,以5~10个模块做成一个电路板组件,并采用插拔式安装结构,各个组件电路相同,可相互替换、任意串联,既能满足不同工作区长度的要求,也可尽量减少现场更换故障模块所需的时间。
现场安装时,需要分段校准,避免误差累积。
2.3 扫描强度处理
在大雾或强降雨天气,红外线穿透能力下降,降低了红外扫描的可靠性,通常以加大红外发射功率来解决。为此,红外扫描设置了普通、增强和超强三种扫描强度模式。普通模式的红外扫描,红外收发是"一对一"工作,同时只有1个红外模块发射,每次移动1位;增强模式的红外扫描,红外收发变为"一对二"工作,同时有2个相邻红外模块发射,每次移动1位;超强模式的红外扫描,红外收发变为"一对三"工作,同时有3个相邻红外模块发射。很显然,后两种模式的红外发射功率分别是第一种模式的2倍和3倍。后两种扫描模式的定位精度会有所降低,但最多不超过2△L。
2.4 红外抗干扰处理
由于定位装置在室外场地工作,在电路设计上应考虑对日光等背景红外线的抗干扰措施。具体采取了3项措施:
(1)封闭接收头。将接收头置于带窗口箱体中,避免日光对其直接照射。
(2)动态红外线发射。日光等背景红外线一般不会有巨烈波动,因此,对红外线进行脉冲调制,以动态红外线发射效果较好。
(3)选用抗干扰接收头。电路采用了抗干扰能直射日光红外线干扰中有效检出红外线信号。为达到SBXl6i0-02接收头最佳工作点,脉冲发生器产生的振荡信号频率应在(38±0.5)kHz之间。
2.5 大跨度电子移位电路开关信号丢失处理
电子移位电路通常由约100片74LSl64串联组成,电路长达数10 m,由于分布参数的影响,造成各片74LSl64的移位时钟信号CLK的不同步,极易导致开关信号在移位过程中丢失,使扫描"半途而废"。为此,对各片74LSl64的移位时钟信号CLK,应采用并联驱动,并保证各片74LSl64的时钟信号处于同一个驱动级上,同时尽量减小电路阻抗,提高驱动电路的功率。
- 基于LIN总线的倒车雷达系统的设计与实现(05-23)
- 基于MSP430的倒车雷达设计(06-15)
- 一种智能化倒车雷达主控芯片设计(09-08)
- 汽车倒车雷达设计(10-24)
- 一种高精度超声波测距系统的改进(10-17)
- 基于换能器解卷积的高精度超声波测距系统(10-18)