基于FPGA的GPS+GSM双重车载定位系统设计
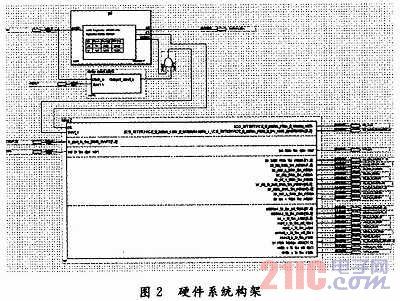
选择Start Analysis&Synthesis开始分析和综合,完成后进行引脚分配,检查无误后执行Start Assembier,对输入设计进行汇编;将汇编好的编程配置文件GPS.sof通过JTAG方式下载到定位终端目标板上,即可完成硬件的所有综合设计。
3 利用NiosⅡIDE进行系统软件设计
3.1 软件总体构成
定位系统软件主要完成定位信息的采集和定位终端与监控中心之间的数据通信,主要由主程序、显示程序、GPS信息处理程序和GSM信息处理程序组成。主程序完成系统的初始化、自检、人机交互操作和定位信息的处理等功能。
3.2 GSM网络定位及通信
目前,中国移动和中国联通的移动通信网络既是语音通信网络,又是一个能提供丰富数据业务的网络,只要当地网络开通了位置服务功能,选用支持STK的SIM卡,即可通过STK命令得到位置信息。GSM网络通信主要以短消息的方式进行,包括短消息的接收和发送。在短消息的收发程序设计中运用AT命令来实现,其包括定位和监控信息的编码和解码、通信模式设定和联机测试、短消息的收发、收发数据的关键命令字的模式匹配。
3.3 GPS信号定位
在进行信号稳定跟踪以前,首先需要实现信号的捕获来确定信号是否存在。通用接收机对载波信号的捕获通常采用一维的串行相关搜索。在本文所描述的高动态情况下,载波多普勒频偏最大为±14 kHz,若选择频率搜索步进为500 Hz,需要57次才能完成整个28 kHz带宽的搜索,显然非常耗费时间。而利用傅里叶变换将信号从时域变换到频域后,通过把原来的时域串行搜索变为频域并行搜索,进行1次并行搜索就能等同于传统方式下的57次串行搜索,大大节约了搜索时间。GPS定位流程如图3所示。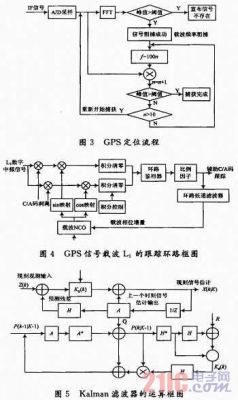
3.4 GPS信号追踪
完成信号捕获后,需要对信号进行精确稳定的跟踪,保证后续导航电文的正确解调。载波跟踪环由预检测积分器、环路鉴别器和滤波器组成,图4为GPS信号载波L1的跟踪环路框图。
3.5 Kalman滤波算法
目前,比较难处理的是GPS信号随机误差系统中的多路径效应。多路径效应误差是人们关注最多的误差,严重影响GPS测量精度。严重时还将引起信号失锁。信号在到达接收机之前可能经过多路反射、干涉,导致信号相位和光程产生很大变化。该类误差较难处理,不能通过差分处理补偿。针对上述现象本文提出一种在多路径条件下的Kalman滤波算法,Kalman滤波器是一种线性最小方差滤波器,它不但考虑了信号与测量值的基本统计特性(一、二阶统计特性),而且,由于采用了状态空间的概念,用状态方程描述系统,信号作为状态,所以,它既能估计平稳的标量信号随机过程,又能估计非平稳的矢量随机过程。它能够从一系列的不完全包含噪声的测量中,估计动态系统的状态。所以被广泛用于自动导航和定位系统中。本设计利用Kalman Filter以及回归直线的平滑化,有效改善了多路径环境下的GPS测位结果的连续性和直线性,用在GPS/GSM导航系统中,使系统做到定位精准、连续、无盲区。图5是Kalman滤波器的运算框图。
3.6 系统整合实现
启动NiosⅡIDE工作环境,创建工程。选择主菜单File/New/Project,选择Altera NiosⅡ/C/C++ Application,设置工程名为GPS,在SoPCBuilder Systam选项中选择Sy-stem.ptf文件,该文件包含由SoPC Builder创建的NiosⅡ系统硬件信息,选择Blank Project模板,将C软件代码导入工程中。实时操作系统μC/OS-Ⅱ是一个完整的、可移植、固化和裁剪的占先式实时多任务内核。μC/OS-Ⅱ提供以下系统服务:任务管理、事件标志、消息传递、内存管理、信号量、时间管理。在应用程序中,可以方便地利用这些调用实现复杂实时系统控制功能。在NiosⅡIDE环境下,选择Tools/Fl-ash Programmer,在弹出的对话框中选定下载一个文件到FLASH存储器中,单击右侧Browse按钮,选择已经保存好的电子地图文件(raw格式 )。指定存储器(Memory)为cfi_flash,偏移地址(Offset)为0X1000,单击Program Flash下载。
仅有GPS导航的状态下与在GPS+GSM共同导航的状态下系统实现的最终效果对比如图6,图7所示。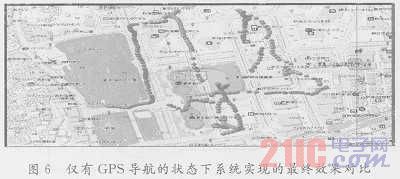

4 结语
本设计在以FPGA为核心,利用NiosⅡ软核的集成度高、配置灵活、扩展性强的特点,构建了GPS+GSM的双重定位系统,解决了传统车载定位系统的不足,做到定位可靠,无盲区的效果。μC/OS-Ⅱ实时操作系统的嵌入,使系统的整体控制能力增强,为后期添加复杂的智能导航算法及扩展成为移动多媒体平台奠定了基础。
- 基于SoPC的汽车安全监控系统设计(07-09)
- 基于SOPC 技术的车辆电子后视镜系统设计(03-12)
- 基于SOPC 的车辆电子后视镜系统设计(10-16)
- 基于SOPC技术的多功能车载终端设计(01-16)
- FPGA技术在汽车电子中的应用(11-26)
- 电源分配结构的三大转变为电源管理技术开创新局面(01-10)