一项基于光电管路径识别的智能车系统设计
时间:05-15
来源:21ic
点击:
3 实验验证
智能车路径识别的关键在于快速地判断弯道并快速、准确地响应。智能车行进过程中,从长直道进入连续弯道时,由于曲率变化很小,此时转速的设定值较大,加之舵机响应时间的限制,智能车极易脱离轨迹。采用加长转臂的舵机及合理的路径搜索算法,可以增强智能车对轨迹的跟随性能。图9所示为智能车寻迹连续弯道试验效果图。其中,粗线为所寻迹的黑线,细线为智能车实际运行轨迹。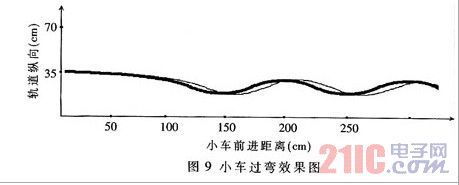
4 结语
本文设计了一个智能车控制系统,实现了快速自动寻迹功能。在硬件上,该系统采用MC9S12DG128B单片机为控制核心,协调电源模块、路径识别模块、车速检测模块、舵机控制模块及直流驱动电机控制模块的工作;在控制算法上,采用路径搜索算法和类PI控制算法实现对智能车的舵机转角和电机转速的控制。此外,系统还完成了对加长转臂舵机的控制,实现了转向伺服电机与车速的配合控制。实验结果表明,该智能车系统响应快,动态性能良好,整体控制性能良好。
- 一种非均匀行采集的智能车路径识别算法(10-22)