发动机转速信号模拟器设计方案
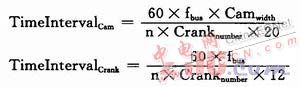
平分20等份,通过不同占空比的PWM信号来逼近正弦信号中的20段,如图4(a)所示;把曲轴信号的一个正弦周期平分12等份,通过不同占空比的PWM信号来逼近其中的12段,如图4(b)所示。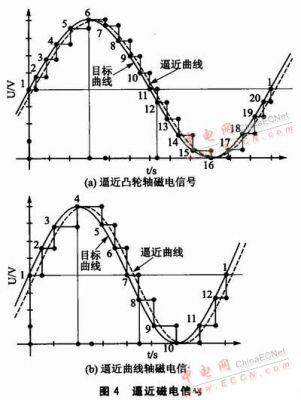
计算逼近各点时间间隔。计算公式如下:
其中,TimeIntervalCrank为曲轴信号逼近各点时间的间隔计数值;TimeIntervalCam为凸轮轴信号逼近各点时间的间隔计数值;fbus为时钟总线频率(Hz);Cranknumber为曲轴齿数(60、48);Camwidth为凸轮轴齿宽(1,2,3…);n为发动机目标转速(rpm)。
图4中,实线为逼近的目标曲线,虚线为逼近得到的曲线,逼近后的曲线相对于目标曲线向右平移了一小段相位,在程序中应提前逼近的开始时间,以消除逼近相位误差。
PWM通道的模数寄存器的值恒定为19,正弦信号最大值对应的值寄存器的值为Rang,如图4中的"6"点和"4"点。为了保证正弦信号的幅值随着转速值而变化,Rang随发动机转速增加而增大,
Rang=Rang(nspeed)。
当逼近一个曲轴信号正弦波时,正弦信号中各点对应的正弦值如表1所列。各点对应的单片机值寄存器的值为TPM2CV0=Rang(nspeed)×Sin(Number)。同理,可以得到逼近凸轮轴磁电信号20个点对应值寄存器的值TPM2CV1。

为了省去单片机做乘除法运算所占的时间,在程序中将各点对应的寄存器值做成数组,直接调用。如果要逼近与图4极性相反(先负后正)的正弦波,只需颠倒各点逼近顺序,即逼近顺序为20,19,18,…,2,1。
3.2 生成凸轮轴信号和曲轴信号
曲轴信号流程如图5所示。首先判断曲轴信号模式。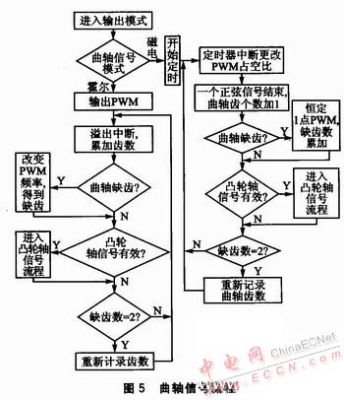
若模式为霍尔,则输出PWM霍尔信号。在溢出定时中断内累加曲轴齿数,若判断曲轴缺齿有效,则改变PWM频率,得到2个缺齿信号后,一个循环结束,曲轴齿数重新计数。在主程序中判断何时输出凸轮轴信号。
若模式为磁电,则输出PWM逼近信号,开始逼近定时。在定时中断中设置逼近各点的占空比,记录逼近点个数,一个正弦周期结束后,曲轴齿数累加1。若判断缺齿有效,则输出图4中恒定"1"点所对应占空比的PWM信号,两个缺齿后一个曲轴循环结束,曲轴齿数重新计数。在主程序中判断何时输出凸轮轴信号。
凸轮轴信号流程:若信号模式为霍尔,则在主程序中通过I/O口输出霍尔信号。若信号模式为磁电,则输出逼近PWM信号,在定时中断中设置逼近各点的占空比,记录逼近点个数,一个正弦周期结束后结束逼近定时,输出图4中恒定"1"点所对应占空比的PWM信号。
4 实验验证
设定模拟器参数如下:曲轴齿数为(60-2)个齿,凸轮轴齿数为(4+1)个齿,凸轮轴齿宽为6个曲轴齿宽,多齿超缺齿12℃A(曲轴转角是以℃A表示),凸轮多齿超凸轮1齿为60℃A。通过示波器观察得到图6所示的信号。
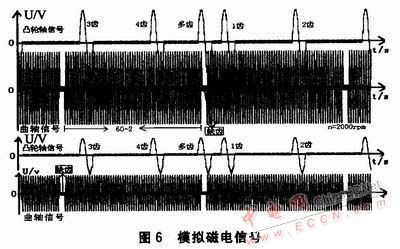
图6所示曲轴信号模式和凸轮轴信号模式均为磁电。模拟信号满足设定参数要求,并且幅值、相位准确,相对相位准确,频率稳定。上下两组信号的转速分别为2000rpm和1000 rpm。比较可知,磁电信号幅值随转速而变化。
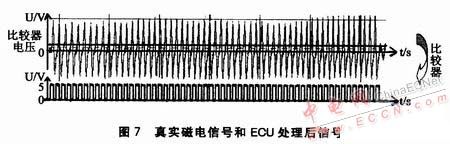
真实测得的磁电信号以及经ECU处理后的信号如图7所示。该信号在ECU中经过比较器处理后转换为方波信号,进而被单片机采集。模拟得到的磁电信号经过比较器后,同样转换为一个方波信号。虽然模拟信号与真实磁电信号存在差异,但是经过比较器后得到形同的方波信号,对单片机来说就是相同的信号,所以模拟信号能够替代真实的磁电信号。
5 结论
实验证明,PWM信号逼近正弦信号的方法可以在8位机上模拟出标准的磁电正弦信号,并且该信号可以替代真实的磁电信号。本模拟器系统可以在100~6000 rpm范围内精确模拟发动机转速信号,满足设计要求。由于8位单片机的处理能力有限,该模拟器不能实现磁电信号幅值随着转速连续、线性地变化,但是并不影响模拟器的功能。若改为使用。DSP处理器,采用级数逼近或者迭代逼近的方法即可实现。