改进的汽车安全气囊控制算法
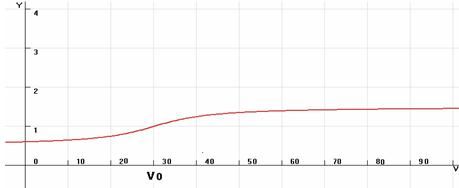
图3 函数波形图
当v超过30km/h的时候,y的值就大于1;反之就小于1。现在普遍采用的标准是,安全带配合使用的气袋引爆车速一般为:低于20km/h正面撞击固定壁时,不应点爆。而在大于35km/h碰撞时,必须点爆。在20km/h和35km/h之间属于可爆可不爆的范围。所以我们取v0=30km/h为标准点,这样结合上面的移动窗积分算法,提出新的S1,则S1为: (4)
(4)
这样当v>v0时,汽车点火引爆的灵敏度就比原来大了;而v<v0时,点火灵敏度就比原来小了。再引入座位是否有人信号c,有人时c=1,反之c=0。 (5)
(5)
S' 即为加入了v和c的双加速度合成积分量,其优点是可以减少气囊误触发的几率,更好的保护乘员的安全。再考虑到v>v0时引爆气囊的灵敏度不需要太大,可以适当调整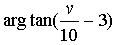 的系数为1/∏,此时y函数图形如图4。
的系数为1/∏,此时y函数图形如图4。
图4 函数波形图
由图4可看到,采用增加了速度函数的算法后,使到v>v0时的灵敏度适当增加,同时也有效的减少了v<v0(低速)时的误点火几率。这个参数可以通过大量的碰撞实验来确定,使得点火效果最优。
2.3 利用模式识别的方法提出的控制算法
上述利用数据融合改进的移动窗控制算法是一种利用直观概念进行设计的方法,采用的是实时计算得出碰撞判决指标,缺点是计算量比较大,控制系统的性能要求较高。如果能够直接根据输入进行点火判断,则计算量会大大减少。
为了减少计算量,使点火控制速度更加迅速,可以采用模式识别的方法。原理如下,在台车碰撞试验中采用第二节中提出的加入了速度函数的改进移动窗算法,对不同的输入(加速度和速度)及其结果进行判断,并将其记录下来,得到一个数据库。再利用模式识别的方法,结合大量的记录,则可以求出某一车型的气囊点火判断的判别函数。然后在实际应用中可以利用判别函数对输入的加速度和速度直接进行判别,对汽车状态(气囊弹出和气囊不弹出)进行分类,从而大大减少计算量。
3 设计判别函数原理
气囊的弹出(w1)与不弹出( w2)可归结为通过对对象(汽车的碰撞)n组特征观察量(a1,a2....an,v)的判断(这里取汽车碰撞的加速度和速度为特征观察量),从而对x=[a1,a2....an,v]进行归类。在归类中,我们总是希望错误率最小,所以可以采用基于最小错误率的贝叶斯决策[6]。
通过对上述数据库的统计,我们可以得到气囊弹出的概率P( w1),从而P(w2)=1-P(w1)。
要对x进行分类,还需要类条件概率密度。p(x|w1)是气囊弹出状态下观察x的类条件概率密度;p(x|w2)是气囊不弹出状态下观察x的类条件概率密度。这样我们可以算出w1和w2的后验概率,如式(6): (6)
(6)
基于最小错误率的贝叶斯决策规则为:如果P(w1|x)> P(w2|x),则把x归类于弹出状态w1,反之P(w1|x)<P(w2|x),则把x归类于不弹出状态。把它设计成分类函数的形式,则可以直接利用分类函数进行判别。如式(7): (7)
(7)
x是样本向量,w为权向量,w0是个常数。在实际操作中,可以通过上述数据库中大量的样本来计算出w和w0。得出g(x)后,则可以对实际中检测到的一组特征值进行评估,以决定是否引爆气囊。
二维的情况下g(x)的示意图如图5所示。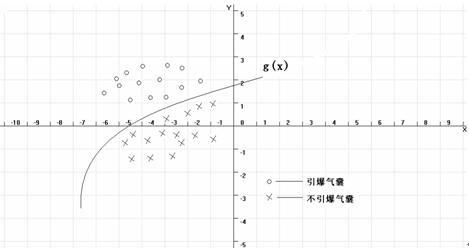
图5 分类函数示意图
如图5所示,分类函数g(x)可以将两种状态(引爆气囊和不引爆气囊)很好地区分开来,实现了对汽车碰撞状态的即时判断。而这种算法只要求系统进行一个查表的运算,大大减少计算量。
4 总结
综上所述,移动窗算法对于低速的抗干扰方面存在不足;而加入了速度函数的改进算法,能够适当增加系统在高速时的灵敏度,又能减少低速时的气囊误触发几率,符合现代安全气囊的控制要求;模式识别的控制算法是建立在前面正确的控制算法的基础上,利用大量的历史数据得出判别函数,从而直接对气囊是否弹出进行判断,大大减少计算量。
- 英飞凌安全气囊控制解决方案(02-13)
- 汽车安全气囊技术及其发展趋势(02-22)
- FRAM技术为智能安全气囊系统提供“智能性” (10-12)
- 汽车安全气囊的控制(07-12)
- 汽车安全气囊加速计MMA2204D及其应用(09-08)
- 自动检测技术在汽车安全系统中的应用(08-14)