CAN总线混合动力骄车电控系统的设计与实现
,这也是本混合动力电控系统的一个与众不同的特色,由于CAN总线的使用,减轻了电控系统的线束重量,降低了系统的复杂性。另外,由于CAN总线是差分传输的一种抗干扰能力很强的现场总线,从而保证了系统通信的可靠性。
CAN总线简介
CAN总线是德国Bosch公司20世纪80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。CAN已成为国际标准(ISO-11898),是具有国际标准的现场总线,规范2.0A和2.0B。CAN总线可支持8/16位CPU,可与各种处理器接口或组成智能化仪器仪表;可工作于多主工作方式,任一节点任一时刻均可主动发送信息,不分主从,通讯方式灵活,可方便的构成多机容错系统;节点可分成不同优先级,满足不同的实时要求;采用非破坏性总线仲裁技术,多点同时发送时,优先级低的节点,主动停止发送,优先级高的不受影响继续发送,有效的避免了总线冲突;可采用点对点、一点对多点及全局广播等方式传送和接收数据,直接传送距离达10km/5Kbps,速率最高达1Mbps/40m,总线上的节点数据理论值达2000个,实际由于时延可达110个;采用短帧结构每一帧有效字节8个,传输时间短,受干扰概率低,重新发送快;通讯介质可采用双绞线及光纤;用户接口简单、编程方便;温度-40℃~+125℃工作;节点故障时有自动关闭总线功能,可以与总线脱离,不影响总线操作;每帧具有CRC校验和其它检测措施,保证出错率极低;具有很高的适应性;接口收发器具有瞬时电压保护,RT抑制、热保护、短路保护等。
通信协议
本系统在CAN2.0A协议基础上定义通信协议。N1节点发出命令,N2~N6节点接受后不发确认信号,N1节点收到N2~N6节点的信息后判断是否正确,如果不正确或在规定的时间内收不到N2~N6帧,则重新发命令,重发超过规定的次数为通讯故障;N2~N6帧发出信息,N1节点接受后,不发确认信息,N2~N6节点在规定的时间内收不到N1节点的命令,则为通讯故障;N6节点收到N1帧上电复位后的第一帧时在规定的时间内回答,在运行时若N6无故障,则不回答N1.节点数据帧基本结构定义如下:
系统中每个节点数据帧用ID区别,每个节点可定义多个不同的数据帧,用以传送不同的信息。
性能分析
表1为混合动力汽车与传统汽车性能对比,从测试参数来看混合动力汽车的动力和经济性方面均比传统汽车要优越,其排放也达到了"欧2"标准,而且通过测试可知,其尾气中因不完全燃烧而产生的CO和NOx量要比传统汽车要少。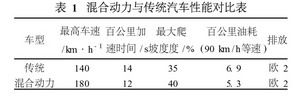
结束语
提出了一种由智能节点和CAN总线通信网络构成的混合动力汽车的电控系统,在国内混合动力车的控制系统中以CAN总线构成网络控制系统,CAN总线良好的性能在此得到了验证。从性能角度看,在电控系统优秀控制策略的控制下,混合动力汽车的发动机能最大限度工作在高效率和低排放的状态下,同时也可将部分能量进行回收,达到了混合动力的节能和环保目的。另外,由于电机动力的加入也提高了汽车的动力性能。可以断定,随着电控系统技术的进一步发展,混合动力汽车必将成为绿色汽车产业的发展热点。
- 混合型和燃料电池型汽车的电子设计挑战分析(01-10)
- 先进的汽车动力电气系统开创混合动力新时代(01-10)
- 采用塑料封装和IMS衬底的混合动力汽车功率IGBT模块(01-10)
- 专家揭密:丰田Prius汽油/电力混合动力车(二)(01-10)
- 专家揭密:丰田Prius汽油/电力混合动力车(01-10)
- 超级电容集成优化混合动力公交车动力总成(01-10)