汽车纵向碰撞预警系统研究
安全系数γ的取值规则如下:
 前车处于静止状态,或者前车匀速行驶且本车的速度快于前车,即aq=0,以本车最大减速度计算的安全车距比较合理。实际交通中驾驶员考虑到乘车舒适性而较少用最大减速度操作,在未到最小安全车距之前已经采取措施,预警模型的主要作用是提醒驾驶员疏忽或注意力分散时的操作状态,故安全系数权重γ=1。
前车处于静止状态,或者前车匀速行驶且本车的速度快于前车,即aq=0,以本车最大减速度计算的安全车距比较合理。实际交通中驾驶员考虑到乘车舒适性而较少用最大减速度操作,在未到最小安全车距之前已经采取措施,预警模型的主要作用是提醒驾驶员疏忽或注意力分散时的操作状态,故安全系数权重γ=1。
前车突然减速时,有三种情形:
(1)两车减速度相等,满足公路行车的一般条件,以此种情况计算的安全车距为基数,通过测算前车的减速度,确定安全系数权重γ。
(2)本车减速度小于前车减速度,本车制动效能差于前车属于最危险情况,但出现的概率不多。
(3)本车减速度大于前车减速度,本车制动强度高于前车制动强度,或本车制动强度随前车的变化而变化,并且始终高于前车,是公路行车常见的情况。此时,计算的安全车距过小,不适宜作为预警依据。
综上所述,当aq=0时,如上所述γ=1;当aq<5.0 m/s2时,本车减速度有能力高于前车减速度,取γ=0.8;当5.0<aq<6.8 m/s2时,认为本车减速度能够等于前车的减速度,取γ=1;当aq>6.9 m/s2时,考虑不利条件即本车减速度小于前车的减速度,取γ=1.2。
3.2 试验验证
在结构化道路上选用五菱之光6400C3加长版微型车作为实验车辆,利用上述基于前车状态和安全系数的安全车距预警算法对车辆跟驰距离的预警时刻进行验证。结果表明,系统能够可靠地给出预警,并且预警时刻的车间距离对于驾驶员是可接受的。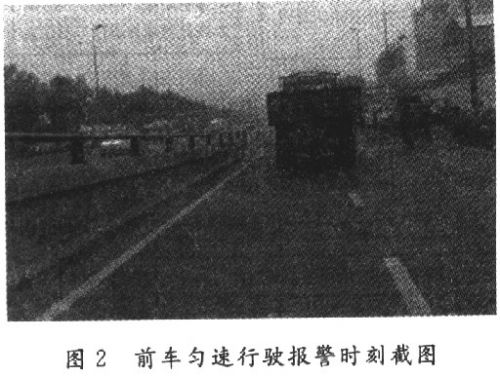
图2是前车匀速行驶,本车加速行驶时的报警时刻截图。此时,车间距离为24.895 m,两车相对速度为5.513m/S;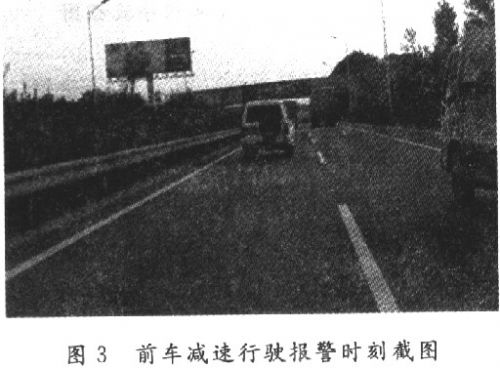
图3为前车减速行驶,本车以90 km/h匀速行驶时的报警时刻截图。此时,车间距离为45.847m,两车相对速度为8.571m/s。
4 系统设计
汽车纵向碰撞系统的实时性要求处理器具有较快的运行速度和较强的实时调度能力,研究中选用美国德州仪器公司(TI)设计和出品的利用达芬奇技术(Davinci),基于DSP和ARM9双核的TMS320DM6446ZWT片上系统(SoC)的评估板作为系统的硬件平台,选用Linux系统作为嵌入式操作系统。
系统首先接收图像传感器传送过来的图像,将彩色图像转化为待处理的灰度图像,利用中值滤波、Sobel算子边缘检测、自适应阈值分割等图象处理的方法,消除噪声平滑图像,经过边缘检测和图像分割获得二值化图像。
在二值化图像和灰度图像基础上对前方车辆轮廓进行识别,确定前车轮廓尺寸及其底边位于平面图像中的位置,根据汽车纵向碰撞预警模型实现跟车距离的计算和安全车距的预警。软件流程图如图4所示。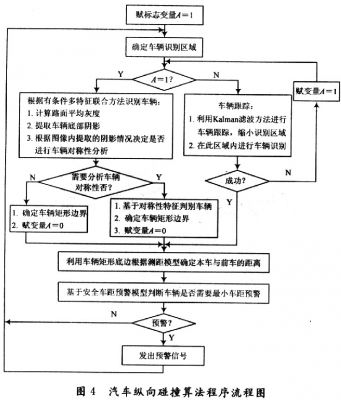
5 结语
提出了基于前车运动状态和安全系数权重的汽车纵向碰撞预警算法,保证驾驶安全的同时确保公路行车的通行能力,计算报警距离与驾驶员认可的跟驰安全距离相一致,改善了系统的可信任度;嵌入式系统的应用有效地减少了系统的体积,有利于系统的应用和推广。
- 车道偏离报警(ldw)系统技术(10-03)
- 光电鼠标技术在汽车领域应用的可行性(08-13)
- 基于DSP和ARM9的汽车纵向碰撞预警系统设计(09-23)
- 汽车图像传感器在提高行车安全和驾乘体验方面的应用(05-22)
- 辅助驾驶: 汽车离道报警完整结构设计(06-28)