基于MC9S12微控制器的发动机高能直接点火控制
随着电子技术的发展及对发动机性能要求的提高,微机控制的电子点火系统逐渐取代了传统的发动机点火系统,实现了更为精确的点火时刻和点火能量的控制。在发动机点火系统中,采用的每个发动机汽缸各带一个点火线圈,对各缸点火线圈进行独立控制的点火系统,称为无分电器各缸独立点火系统,也叫高能直接点火系统。采用高能直接点火可有效地增加点火线圈初级回路的储能,减少点火能量的传导损失,从而提高点火能量,满足车用发动机稀薄燃烧、增压和使用代用燃料(如天然气、酒精)等新技术的发展要求。对于多缸发动机,这种高能直接点火系统由于控制事件多,要求的控制电路和控制软件复杂,因而对微控制器的性能和控制软件均有较高的要求[1]。
MC9S12系列是MOTOROLA公司开发的一种高性能16位微控制器(MCU),具有丰富的输入输出接口功能、较强的数值运算和逻辑运算能力,特别还具有较强的定时控制功能,使其适用于复杂时序控制技术的应用中[2]。本文针对六缸车用发动机高能直接点火控制系统的开发,进行了以MC9S12DP256微控制器为核心的电子控制单元的软硬件系统设计。
1 高能直接点火系统及控制要求
图1所示为六缸发动机的高能直接点火系统电路原理图。系统由输入信号传感器、电子控制单元(ECU)及点火执行器三部分组成。其中,点火执行器包括每缸独立的共六组点火线圈和火花塞。点火线圈作为储能元件,由匝数比很高的次级绕组和初级绕组构成,其作用相当于变压器。当初级绕组电路(初级电路)导通时,初级绕组电感线圈中的电流按照指数规律增加,从蓄电池获得的能量以磁场能的形式储存在初级线圈中;当初级电路断电时,次级绕组感应出高压电,使火花塞电极间产生电火花,将汽缸内的混合气点燃。在图1所示的系统中,由微控制器发出的控制信号经过点火器中的功率三极管的驱动放大,实现了对初级电路的通断电控制。与传统点火系统只使用一个点火线圈相比,这种直接点火控制方式可利用更长的时间积蓄点火能量,并可将点火线圈与火花塞安装在一起,减少高压电流的传递损失,从而获得较高的点火能量。 
点火控制包括点火顺序控制、点火定时控制和点火能量控制。点火系统应按发动机的工作顺序进行点火,即点火顺序应与发动机的工作顺序一致,否则不能适时点着混合气,发动机就不能正常工作。点火定时控制的目的是使发动机功率输出大、油耗低、爆震小和排放低,点火系统必须在最有利的时刻点火,并需在上述目标之间进行折衷。点火时刻用点火提前角来表示,从火花塞开始跳火到活塞运行至压缩行程上止点的时间内曲轴转过的角度被称为点火提前角。发动机在不同工况下的最佳点火提前角是不同的。在微机控制的点火系统中,根据发动机转速、负荷等传感器的信号确定发动机运行工况,计算出最佳的点火时刻,并由微控制器输出控制信号,使功率三极管截止、初级电路断电,从而实现控制。
点火能量直接影响发动机的着火情况。对于使用增压、稀燃及替代燃料等新技术的发动机,只有点火能量足够高,才能可靠燃烧,达到提高经济性和改善排放的目的。高能直接点火的关键是保证在任何工况下都能够提供足够的点火能量。电感储能式点火系统控制点火能量的实质是控制点火线圈在断电时刻的初级电流,这是靠控制初级电路的通电时间来实现的。点火时刻初级电流所能达到的值,即初级断开电流,与初级电路导通的时间长短有关,必须保证初级电路的通电时间来使初级电流达到点火能量的要求。但如果通电时间过长,点火线圈又会发热并使电能消耗增大。因此,控制一个最佳的初级电路通电时间需兼顾上述两方面的要求。
综上所述,对于六缸发动机的高能直接点火系统,为保证发动机的性能要求,需按点火顺序、点火时刻和点火能量的要求实现六个独立点火线圈初级电路的适时通、断电,即微控制器要完成多通道的复杂时序控制。
2 ECU的硬件结构设计
如图2所示,适用于六缸发动机的高能直接点火电子控制单元以MC9S12DP256微控制器为核心,并由电源、输入信号整形处理、驱动放大电路和通讯电路等功能模块构成。 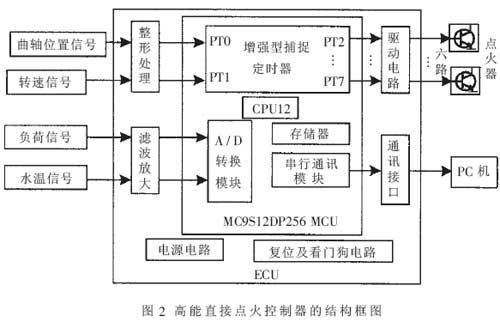
MC9S12DP256微控制器采用了高性能的16位处理器HCS12,可提供丰富的指令系统,具有较强的数值运算和逻辑运算能力;其内256K字节的FLASH存储器具有在线编程能力,4K字节的EEPROM和12K字节的RAM可存储各种控制参数。MC9S12DP256的低功耗晶振、复位控制、看门狗及实时中断等配置和功能更有助于系统的可靠运行[2]。
MC9S12DP256丰富的接口资源为ECU输入输出功能的实现提供了方便。负荷信号(节气门位置和进气压力)、水温信号、蓄电池电压信号等系统模拟输入信号由放大滤波电路处理
- 胎压监测系统(TPMS)技术与设计考虑(11-26)
- 利用先进的MCU技术实现电机高效率控制(01-10)
- 基于MCU和DSP的步进电机控制技术(01-10)
- 车载液晶电视/显示器专用MCU及设计方案(01-11)
- 用MCU来控制蓝牙GPS模块 (07-06)
- 如何解决汽车车身控制设计的三大挑战 (09-29)