汽车电动助力转向系统EPS原理详解
轴的工作区域不应该大于弹性区域的1/3,且取初始段。为了将迟滞误差减低到最底,按照超载能力指数选取最大的轴径。
(2)采用LM型硅扩散力敏全桥应变片,较好的敏感性,很小的非线形度
(3)采用高精度的稳压电源。
4、非接触式扭矩传感器
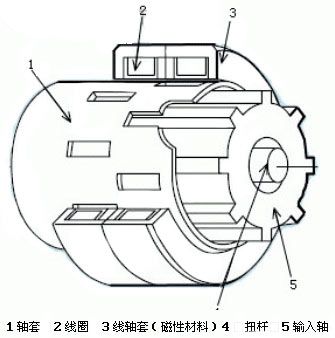
图4
如图4所示为非接触式扭矩传感器的典型结构。输入轴和输出轴由扭杆连接起来,输入轴上有花键,输出轴上有键槽。当扭杆受方向盘的转动力矩作用发生扭转时,输入轴上的花键和输出轴上键槽之间的相对位置就被改变了。花键和键槽的相对位移改变量等于扭转杆的扭转量,使得花键上的磁感强度改变,磁感强度的变化,通过线圈转化为电压信号。信号的高频部分由检测电路滤波,仅有扭矩信号部分被放大。非接触扭矩传感器由于采用的是非接触的工作方式,因而寿命长、可靠性高,不易受到磨损、有更小的延时、受轴的偏转和轴向偏移的影响更小,现在已经广泛用于轿车和轻型车中,是EPS传感器的主流产品。
5、其它扭矩传感器
如图5所示为相位差传感方式来检测扭矩的扭矩传感器的结构和测量原理图,这种传感器具有高精度,高重复性的特点。其测量原理为:在受扭轴的两端各安上一个齿轮,对着齿面再各装一个电磁传感器,从传感器上就能感应出两个与动力轴非接触的交流信号。取出其信号的相位差,在这两个相位差之间,插入由晶体震荡器产生的高精度,高稳定的时钟信号。以这个时钟信号为基准,巧妙运用数字信号处理技术就能精确地测出所承受的扭矩。
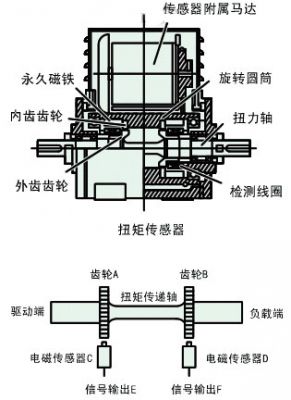
图5
6、EPS扭矩传感器的发展趋势
随着EPS系统的不断完善和发展,对扭矩传感器的精度、可靠性和响应速度提出了跟高的要求。EPS扭矩传感器正呈现以下的发展趋势:
(1)、测试系统向微型化!数字化、智能化、虚拟化和网络化方向发展;
(2)、从单功能向多功能发展,包括自补偿、自修正、自适应、自诊断、远程设定、状态组合、信息存储和记忆;
(3)、向着小型化、集成化方向发展。传感器的检测部分可以通过结构的合理设计和优化来实现小型化,IC部分可以整合尽可能多的半导体部件、电阻到一个单独的IC部件上,减少外部部件的数量。
(4)、由静态测试向动态在线检测方向发展。
- 采用PIC16F877单片机的汽车电动助力转向系统(01-07)
- 常见的动力转向系统详解(04-28)
- 汽车电动助力转向系统扭矩传感器技术详解(05-22)
- 采用PIC16F877的汽车电动助力转向系统(06-29)
- 汽车电动助力转向系统的研究与方案(02-11)
- 基于模糊PD控制的电动助力转向系统建模及仿真分析(02-19)