基于C8051F040的模型车无线控制系统的设计
时间:01-31
来源:作者:东南大学仪器科学与工程学院 程寅 张为公 赵马泉 王东
点击:
该模块的软件设计流程如图6所示。
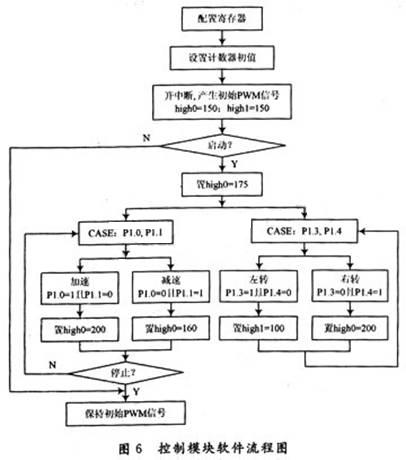
单片机内使用中断方式产生PWM信号,定时单位设为0.01 ms,初始信号为周期16 ms,高电平时间1.5 ms,high0,high1分别控制速度控制波形和转角控制波形的高电平时间。当接收到启动信号后,P1.0,P1.1接收速度信号,P1.3,P1.4接收转角信号。
4 结 语
本文设计了以C8051F040为控制核心的仿真平台,通过与上位机的通信,可以很好地满足机器人仿真驾驶的要求。系统采用上位机无线控制物理模型的方式,使得仿真驾驶更加安全可靠。
该系统具有很好的拓展性,通过无线通信,可以增加更多的数据采集系统用以反馈信息给上位机,拓展了该平台的应用范围。如增加定位反馈系统,则上位机可以屏蔽物理模型的运动进行算法模拟及试验。在参数方面,可以增加高精度的测定反馈系统,通过与上位机保持实时的通信来满足更高的仿真要求。 (发布者:chiying)
- 基于μC/OS-Ⅱ系统的智能寻迹模型车的设计与实现(11-02)