柴油发电机组转速控制半物理仿真
时间:01-08
来源:作者:中南民族大学 彭敏 常广辉
点击:
3.3 VC中仿真系统进一步开发与整合
半物理仿真软件一般由人机界面模块、数据采集模块、仿真运算模块、数据处理模块组成。MTU396柴油发电机组转速控制半物理仿真系统原理如图3所示。下面简单介绍各模块的实现过程。
(1)人机界面模块的实现
人机界面模块构成了VC程序的主线程,主要完成变量的实时显示、参数在线调整、控制参数设置和程序的运行控制等功能,其他模块都由他来调度。本系统中涉及的实时变量有柴油机转速、齿杆位移、柴油机负载等,笔者分别设计了转速表、棒图、趋势曲线、调整滑杆、功能按钮等图元,充分利用面向对象方法的封装、继承等特点实现整个图元库,从而提高了软件系统的可修改性、可重用性和可扩展性。
(2)数据采集模块的实现
数据采集模块通过 PCI-1780设备卡同电子调速器进行数据交互,电子调速器的供油量信号以脉宽调制(PWM)的形式由PCI-1780设备卡传给仿真程序,仿真程序通过仿真计算把柴油机的转速以频率信号的形式经PCI-1780设备卡反馈给电子调速器。数据采集模块由厂家提供的设备驱动API函数实现。
(3)仿真运算模块的实现
仿真运算模块在RTW转化韵仿真模型代码基础上还要加入仿真同步控制,以满足仿真的实时性要求。实时性的关键就是I/O数据定时的准确性。众所周知 Windows不是实时操作系统而是多任务的操作系统,采用VC编制的仿真程序很难实现硬件中断,采用软件定时是比较可行的方法,因为现在的计算机速度都很快,能够保证一般硬件在回路仿真的实时性的需要。
VC中实现精确定时基本上有2种方法:①使用多媒体定时器。他使用单独线程调用一个特殊的回调函数优先级很高,最小定时间隔为1ms能够满足一般实时任务的定时要求。②使用高性能计数器。在Windows2000中由硬件实现高精度的计数器 (high-resolution peRFormancecounter),利用他可以获得高精度的定时间隔。由于本应用中电子调速器输出频率为80 Hz,本文选择多媒体计时器实现仿真控制,定时间隔选为2 ms。即多媒体定时器每隔2 ms就在其回调函数中调用模型代码接口函数rt_On-eStep(模型单步运算),保证整个仿真的向前推进,满足系统实时性要求。仿真运算模块完成模型实时计算是整个系统的核心。
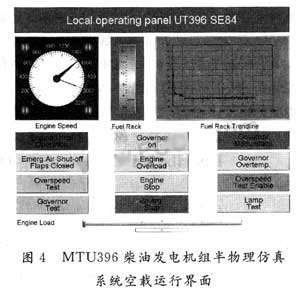
数据处理模块完成仿真数据的实时记录和定时保存功能。为了满足数据记录的实时性,仿真程序采用了多线程的技术,将数据定时保存功能放在独立的数据保存线程中执行。数据处理线程和主线程的之间的同步由事件信号驱动。在C++标准模板库(STL),deque容器基础上创建了CPointsCollection 类来完成数据的实时记录和定时保存。采用的策略是:CPointsCollection首先在内存中开辟2块缓冲区。第一缓冲区数据放满后,数据开始存放到第二缓冲区,然后主线程同时通知数据保存线程将第一缓冲区中的数据采用VC序列化功能保存到硬盘的文本文件中;等第二缓冲区数据放满后,数据开始存放到第一缓冲区,主线程同时通知数据保存线程将第二缓冲的数据保存到硬盘的文本文件中,这样依次循环保证数据记录的实时性。为了验证利用该方法开发的半物理仿真系统的有效性,运行该系统与R082电子调速器物理连接进行配机试验,仿真结果表明仿真系统相应符合理论分析结果。限于篇幅给出空载起动运行时的运行界面。如图4所示。
结合科研实例详细介绍一种基于RTW和VisualC++的半物理仿真系统快速开发方法,该方法充分利用Simulink和Visual C++各自的优势。首先利用Simulink可视化的建模方法建立系统的仿真模型,然后通过RTW将Simulink仿真模型转化成可移植的嵌入式C++ 代码,最后利用Visual C++灵活的可定制性和强大的界面功能实现完全独立运行的实时半物理仿真系统。该仿真程序在Visual C++环境下可以对仿真程序方便的进行调试a与传统设计方法相比这种方法具有费用低、效率高的特点。
半物理仿真软件一般由人机界面模块、数据采集模块、仿真运算模块、数据处理模块组成。MTU396柴油发电机组转速控制半物理仿真系统原理如图3所示。下面简单介绍各模块的实现过程。
(1)人机界面模块的实现
人机界面模块构成了VC程序的主线程,主要完成变量的实时显示、参数在线调整、控制参数设置和程序的运行控制等功能,其他模块都由他来调度。本系统中涉及的实时变量有柴油机转速、齿杆位移、柴油机负载等,笔者分别设计了转速表、棒图、趋势曲线、调整滑杆、功能按钮等图元,充分利用面向对象方法的封装、继承等特点实现整个图元库,从而提高了软件系统的可修改性、可重用性和可扩展性。
(2)数据采集模块的实现
数据采集模块通过 PCI-1780设备卡同电子调速器进行数据交互,电子调速器的供油量信号以脉宽调制(PWM)的形式由PCI-1780设备卡传给仿真程序,仿真程序通过仿真计算把柴油机的转速以频率信号的形式经PCI-1780设备卡反馈给电子调速器。数据采集模块由厂家提供的设备驱动API函数实现。
(3)仿真运算模块的实现
仿真运算模块在RTW转化韵仿真模型代码基础上还要加入仿真同步控制,以满足仿真的实时性要求。实时性的关键就是I/O数据定时的准确性。众所周知 Windows不是实时操作系统而是多任务的操作系统,采用VC编制的仿真程序很难实现硬件中断,采用软件定时是比较可行的方法,因为现在的计算机速度都很快,能够保证一般硬件在回路仿真的实时性的需要。
VC中实现精确定时基本上有2种方法:①使用多媒体定时器。他使用单独线程调用一个特殊的回调函数优先级很高,最小定时间隔为1ms能够满足一般实时任务的定时要求。②使用高性能计数器。在Windows2000中由硬件实现高精度的计数器 (high-resolution peRFormancecounter),利用他可以获得高精度的定时间隔。由于本应用中电子调速器输出频率为80 Hz,本文选择多媒体计时器实现仿真控制,定时间隔选为2 ms。即多媒体定时器每隔2 ms就在其回调函数中调用模型代码接口函数rt_On-eStep(模型单步运算),保证整个仿真的向前推进,满足系统实时性要求。仿真运算模块完成模型实时计算是整个系统的核心。

数据处理模块完成仿真数据的实时记录和定时保存功能。为了满足数据记录的实时性,仿真程序采用了多线程的技术,将数据定时保存功能放在独立的数据保存线程中执行。数据处理线程和主线程的之间的同步由事件信号驱动。在C++标准模板库(STL),deque容器基础上创建了CPointsCollection 类来完成数据的实时记录和定时保存。采用的策略是:CPointsCollection首先在内存中开辟2块缓冲区。第一缓冲区数据放满后,数据开始存放到第二缓冲区,然后主线程同时通知数据保存线程将第一缓冲区中的数据采用VC序列化功能保存到硬盘的文本文件中;等第二缓冲区数据放满后,数据开始存放到第一缓冲区,主线程同时通知数据保存线程将第二缓冲的数据保存到硬盘的文本文件中,这样依次循环保证数据记录的实时性。为了验证利用该方法开发的半物理仿真系统的有效性,运行该系统与R082电子调速器物理连接进行配机试验,仿真结果表明仿真系统相应符合理论分析结果。限于篇幅给出空载起动运行时的运行界面。如图4所示。
结合科研实例详细介绍一种基于RTW和VisualC++的半物理仿真系统快速开发方法,该方法充分利用Simulink和Visual C++各自的优势。首先利用Simulink可视化的建模方法建立系统的仿真模型,然后通过RTW将Simulink仿真模型转化成可移植的嵌入式C++ 代码,最后利用Visual C++灵活的可定制性和强大的界面功能实现完全独立运行的实时半物理仿真系统。该仿真程序在Visual C++环境下可以对仿真程序方便的进行调试a与传统设计方法相比这种方法具有费用低、效率高的特点。
- 一种基于锁相环的可变量程转速控制系统(05-22)
- 采用MPC5200实现高速视频探测的车内应用(02-22)
- 嵌入式非易失性存储器在汽车系统中的应用(05-13)
- 基于嵌入式的悬架与转向集成控制器研究(05-20)
- 嵌入式电脑在车载电视系统中的应用方案(04-13)
- 基于嵌入式Qt的车载GUI平台的设计(07-10)