新型混合动力汽车检测技术的研究及应用
时间:10-11
来源:作者:重庆大学 王波 徐智敏
点击:
汽车行业的快速发展促进了汽车电子行业的发展,混合动力车型(Hybrid Electric Vehicle,HEV)作为汽车行业的新发展方向,受到了国家的重视。从技术、节能减排效果、产业化能力等诸多方面考虑,混合动力具备了传统内燃机和电动机的优势,将在较长一段时间内占据优势。混合动力车辆技术避免了纯电动车辆在电池技术和能源基础设施上的不足,成为近期新型车辆研究开发的热点。经过国家"863计划"的支持与发展,我国的混合动力车辆技术正在迅速迈向产业化。
1 混合动力控制系统
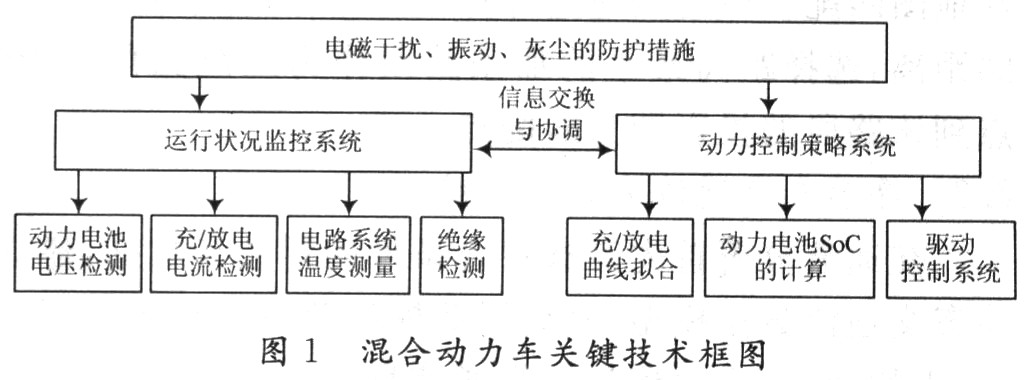
实现混合动力车共有三个关键因素:能够对汽车运行状态详细监控的系统;分析监控系统所获取的信息,并发出相应的控制命令;相比一般电子系统,混合动力车电子控制系统工作在车内非常恶劣的环境,电磁干扰、振动、灰尘等都会造成技术上的瓶颈,如图1所示。
2 动力控制策略系统
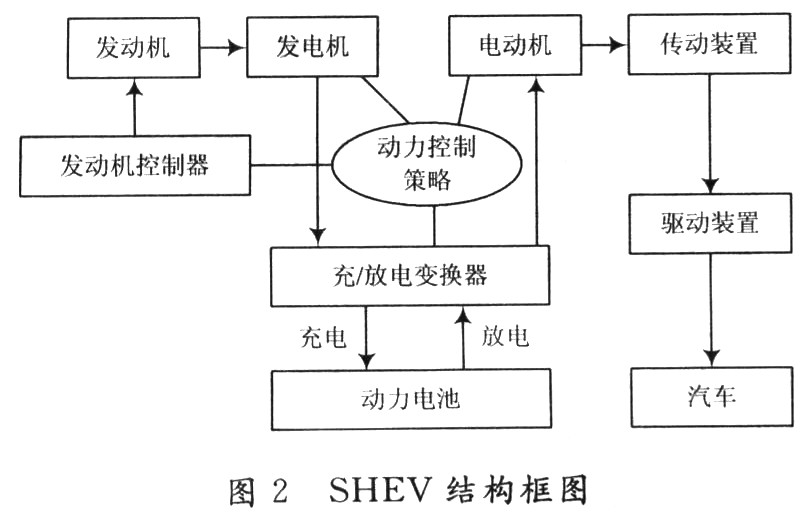
混合动力电动汽车由发动机和蓄电池共同提供动力,发动机和电动机可进行不同组合得到不同的驱动方案,如:串联、并联及混联。整车性能的好坏不仅与发动机和电动机等部件有关,还与其控制策略和优化方法有关。按照能源组合的方式,混合动力电动汽车可按动力驱动方式分为串联式混合动力电动汽车(SHEV)和并联式混合动力电动汽车(PHEV)。本文研究对象是SHEV。SHEV的特点适合城市行驶中频繁起动、加速和低速运行工况,可使发动机在最佳工况点附近稳定运转,通过调整蓄电池和电动机的输出来达到调整车速的目的,从而提高在复杂工况下行驶的车辆的燃油经济性,同时降低排放。在电池的荷电状态(SOC)较高时还可以关闭发动机,只利用电机进行功率输出,使发动机避免在怠速和低速工况下运行,提高发动机的效率,减少有害物质的排放。SHEV的结构如图2所示。
另外,需考虑到动力电池安全性和寿命,当其SOC值变化超出了上述范围,需及时合理地发出相应的控制命令。当SOC大于80%时,动力电池强制放电,控制系统需改变此时的动力混合度的比例,提高动力电池的占总输出功率的比例,此时不再收回发动机产生的富裕能量。当SOC小于20%,动力电池进入强制充电模式,此时由发动机的输出功率的一部分要用于动力电池充电,汽车此时完全由发动机驱动。
3 运行状况监控系统
"运行状况的监控系统"具备采集动力电池的电流、电压、温度,以及车辆的刹车信号、离合器压力信号、行车速度等,准确地获取这些信号是实现混合动力驱动汽车的关键所在。图3是"运行装况监控系统"的一个结构框图。该系统采用两片TLE4275和一片LM2577作为系统的供电模块,输入电压为6~18 V,可满足车辆启动和特殊情况下导致的蓄电池输出电压不稳定而导致的监控系统瘫痪。
处理器系统将采集到的各种信号进行处理后,送至上层的动力策略控制系统,并且上层的控制信号也要传送至底层。本系统采用两路CAN收发器完成这一任务。采用CAN总线技术,不仅组网自由,扩展性强,实时性好,可靠性高,而且具有自诊断和监控能力,它是一种十分有效的通信方式。CAN总线具有以下特点:
(1)无破坏性地基于优先权竞争的总线仲裁;
(2)可借助接收滤波的多地址帧传送;
(3)具有错误检测与出错帧自动重发送功能;
(4)数据传送方式可分为数据广播式和远程数据请求式。
另外,系统还具有一路RS 232收发器,主要用于设计过程中的调试和产品生产过程中的质量检查。
1 混合动力控制系统
实现混合动力车共有三个关键因素:能够对汽车运行状态详细监控的系统;分析监控系统所获取的信息,并发出相应的控制命令;相比一般电子系统,混合动力车电子控制系统工作在车内非常恶劣的环境,电磁干扰、振动、灰尘等都会造成技术上的瓶颈,如图1所示。
2 动力控制策略系统
混合动力电动汽车由发动机和蓄电池共同提供动力,发动机和电动机可进行不同组合得到不同的驱动方案,如:串联、并联及混联。整车性能的好坏不仅与发动机和电动机等部件有关,还与其控制策略和优化方法有关。按照能源组合的方式,混合动力电动汽车可按动力驱动方式分为串联式混合动力电动汽车(SHEV)和并联式混合动力电动汽车(PHEV)。本文研究对象是SHEV。SHEV的特点适合城市行驶中频繁起动、加速和低速运行工况,可使发动机在最佳工况点附近稳定运转,通过调整蓄电池和电动机的输出来达到调整车速的目的,从而提高在复杂工况下行驶的车辆的燃油经济性,同时降低排放。在电池的荷电状态(SOC)较高时还可以关闭发动机,只利用电机进行功率输出,使发动机避免在怠速和低速工况下运行,提高发动机的效率,减少有害物质的排放。SHEV的结构如图2所示。
另外,需考虑到动力电池安全性和寿命,当其SOC值变化超出了上述范围,需及时合理地发出相应的控制命令。当SOC大于80%时,动力电池强制放电,控制系统需改变此时的动力混合度的比例,提高动力电池的占总输出功率的比例,此时不再收回发动机产生的富裕能量。当SOC小于20%,动力电池进入强制充电模式,此时由发动机的输出功率的一部分要用于动力电池充电,汽车此时完全由发动机驱动。
3 运行状况监控系统
"运行状况的监控系统"具备采集动力电池的电流、电压、温度,以及车辆的刹车信号、离合器压力信号、行车速度等,准确地获取这些信号是实现混合动力驱动汽车的关键所在。图3是"运行装况监控系统"的一个结构框图。该系统采用两片TLE4275和一片LM2577作为系统的供电模块,输入电压为6~18 V,可满足车辆启动和特殊情况下导致的蓄电池输出电压不稳定而导致的监控系统瘫痪。

处理器系统将采集到的各种信号进行处理后,送至上层的动力策略控制系统,并且上层的控制信号也要传送至底层。本系统采用两路CAN收发器完成这一任务。采用CAN总线技术,不仅组网自由,扩展性强,实时性好,可靠性高,而且具有自诊断和监控能力,它是一种十分有效的通信方式。CAN总线具有以下特点:
(1)无破坏性地基于优先权竞争的总线仲裁;
(2)可借助接收滤波的多地址帧传送;
(3)具有错误检测与出错帧自动重发送功能;
(4)数据传送方式可分为数据广播式和远程数据请求式。
另外,系统还具有一路RS 232收发器,主要用于设计过程中的调试和产品生产过程中的质量检查。
- 混合型和燃料电池型汽车的电子设计挑战分析(01-10)
- 先进的汽车动力电气系统开创混合动力新时代(01-10)
- 采用塑料封装和IMS衬底的混合动力汽车功率IGBT模块(01-10)
- 专家揭密:丰田Prius汽油/电力混合动力车(二)(01-10)
- 专家揭密:丰田Prius汽油/电力混合动力车(01-10)
- 超级电容集成优化混合动力公交车动力总成(01-10)