基于ITS车辆行驶安全驾驶辅助系统的研究
时间:05-22
来源:
点击:
1.3 控制模块
通过Ad Hoc网络传递过来的车辆信息进入车内整车控制器时,会对所得到的数据进行分析处理。如果分析的结果安全,不做出任何措施;当分析的结果出现警告时,则做出主动预防措施,其过程如图4所示。
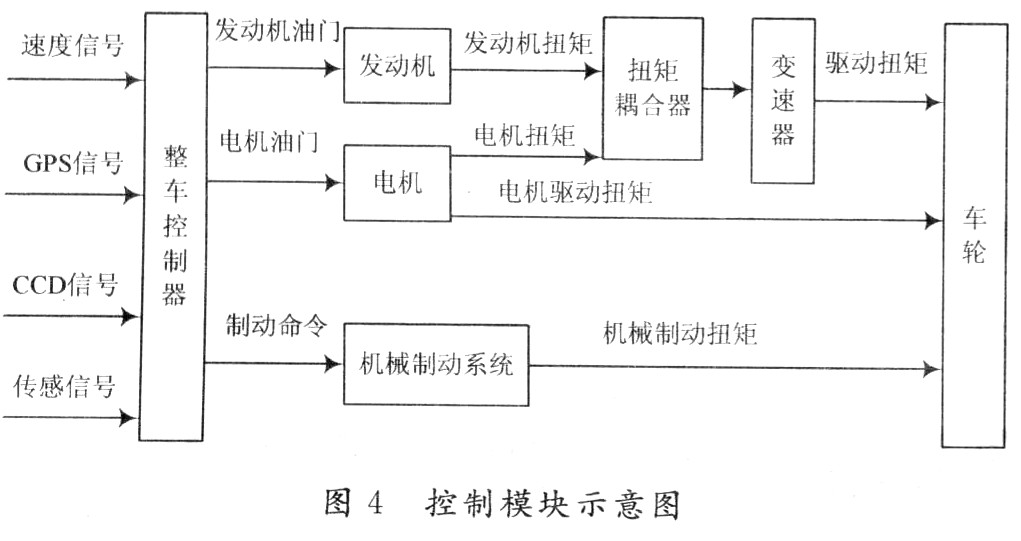
整车控制器根据驾驶员制动踏板及当前车速计算出所需机械制动扭矩值,以得到机械制动系统的制动指令,与原车相比,车轮制动力分别来自产生摩擦制动的制动系统和产生回馈制动的动力传动系统,增加的回馈制动功能由混合动力及传动系统实现,回馈制动力来自电机的制动力矩,并通过传动系统施加于驱动轮上,而回馈制动的能量则通过传动系统传回电机。这样提高了制动的可靠性,从而增加了驾驶辅助系统的可靠性和安全性。
2 车辆定位原理
若要使驾驶辅助系统安全可靠地运行,汽车间重要行驶信息的传递是关键,如何确定与本车进行通信的汽车更是基础。判断过程如图5所示,分为4个步骤。
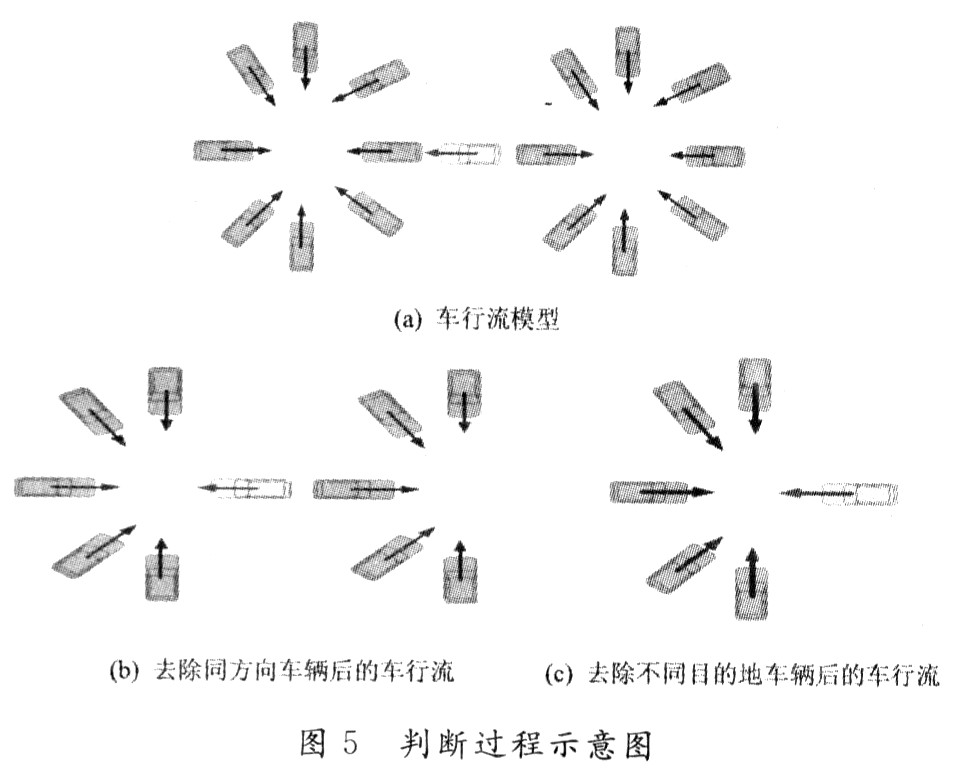
(2)与本车同方向行驶的目标车对本车没有威胁,因此从候选对象中去除(如图5(b)所示);
(3)本车行驶目的地不同的车辆也从候选对象中去除(图5(c)所示);
(4)把余下的车辆当作通信候选对象。
在判断车辆行驶方向的过程中,分析GPS传递过来的信号,通过车辆的位置改变来判断汽车行驶方向;并且在汽车内部,安装陀螺传感器可直接检测出汽车前进的方向。当两个信息所显示的行进方向相同时,就按以上去除规则进行通讯候选车辆的排除;当两个信息所显示的行进方向不同时,则保留作为通讯候选车辆。剩下的候选通信车辆,通过GPS接收机接收GPS卫星信号,求出该车的经纬度坐标、速度、时间等信息。由这些信息可以算出车辆之间的距离,车辆间靠近速度等参数,将距离最近和靠近速度最快的汽车作为通信对象。
为提高汽车定位精度,本系统采用了差分GPS技术。当汽车行驶到地下隧道、高层楼群、高速公路等遮掩物而捕获不到GPS卫星信号时,系统可自动导入自律导航系统,此时由车速传感器检测出汽车的行进速度,通过微处理单元的数据处理,从速度和时间中直接算出前进的距离以及车间的距离和靠近速度。由 GPS卫星导航和自律导航所测到的汽车位置坐标资料、前进的方向都与实际行驶的路线轨迹存在一定误差,为修正两者的误差,所以融入GIS系统,采用地图匹配技术,加一个地图匹配电路,对汽车行驶的路线与电子地图上道路之间的误差进行实时相关匹配进行自动修正,此时地图匹配电路是通过微处理单元的整理程序进行快速处理,得到汽车在电子地图上的正确位置,以指示出正确行驶路线。
3 结 语
驾驶辅助系统,通过所获得的GPS和CCD相机的信号,实时地对车辆行驶过程中的状态信息进行监测,对潜在发生的碰撞事故实时进行预判,当判断结果显示将要发生碰撞事故时,通过Ad Hoc网,进行车辆间的无线通信,将本车行驶参数以及与之通信车的行驶参数互相传递,传输到车内的微控制器中,使得微控制器发出操作指令,提醒司机做出控制,当情况特别紧急时,可以直接对车辆进行恰当的控制。由于驾驶辅助系统不需要安装在道路两旁的固定监测设备,因此,该系统对于未来的ITS是非常有效的。
- 汽车通信的深刻变革(01-16)
- CAN FD,汽车电子下一个“风口”(06-16)