车辆导航定位仿真试验系统研究
时间:05-26
来源:作者:山东理工大学 李士明 曹凯
点击:


人们利用GPS进行导航定位时,用户与卫星的相对位置是影响其性能的因素之一。如何选用定位星座,通常利用几何精度因子GDOP来确定,即定位星座是由使GDOP值最小的GPS卫星组成的。
由卫星对地球和地面目标的覆盖特性可知,顶座星仰角越大,GDOP越小。所以最佳星座中必然包括仰角最大的那颗卫星。从以上分析可知,在选择最佳星座时,首先选取仰角最大的1颗卫星,然后从其他可见卫星中再任选3颗,共同计算4颗星组成卫星星座的几何精度因子值GDOP。如此反复计算,最后将各几何精度因子GDOP排序求得最小值,最小GDOP值对应的4颗星就是最佳星座的卫星组合。
卫星星座GDOP的计算模型主要是以星座的状态矩阵为依据。这里采用最常用的方向余弦法。设α,β,γ分别为测量点到卫星的斜距与X,y,Z轴的夹角。令:

2.4 误差计算
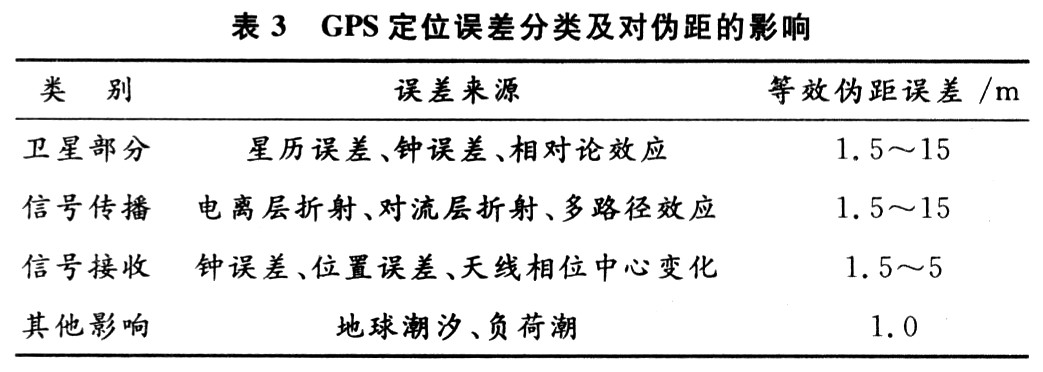
GPS定位是通过地面接收设备接收卫星传送的信息确定地面点的位置,所以其误差主要来源于GPS卫星、卫星信号的传播过程和地面的接收设备。此外,在高精度的GPS定位中,与地球整体运动有关的地球潮汐、负荷潮及相对论效应等的影响,也是导致其误差的不可忽视的原因。
为了便于理解,通常将各种误差的影响投影到观测站至卫星的距离上,以相应的距离误差来表示,称之为等效伪距误差。表3列出了GPS定位的误差类型及等效伪距误差。
2.5 定位求解
定位求解公式如下:

定位车辆在wGS一84坐标系中的位置为一2 429.8 lim(X方向坐标),4 569.8 km(y方向坐标),3 760.7 km(Z方向坐标)。
3 仿真试验系统的数据流程
GPS卫星星座仿真部分将所有卫星在wGS一84中的三维坐标实时输入到可见星判断部分,通过可见星判断得到观测点上空的可见卫星,并将其三维坐标数据输入到最佳定位星座选择仿真部分,该部分根据最佳定位星座选择方法得到由可见星中4颗组成的最佳定位星座,并将其坐标输入到车辆定位仿真部分,车辆定位仿真部分根据最佳定位星座的三维坐标信息解算出车辆的三维坐标,最终实现车辆经纬度的确定,为车辆的定位及导航提供仿真实验数据。

该仿真器模型在Matlab环境下进行建模,得到车辆定位的相关信息如表4~表6所示。


5 结 语
GPS是一种先进的全球定位方法,正广泛应用于车辆定位与导航。该文根据卫星历书,分析GPs星座的运动轨迹,并在此基础上对接收机的位置进行解算,得到仿真的车辆GPS导航系统定位信息,实现定位导航的仿真试验。该车辆定位模型可以模拟真实的卫星定位,为仿真调试、虚拟驾驶等研究带来便利。
- 基于GSM的GPS车辆定位监控系统(上)(11-30)
- 基于GSM的GPS车辆定位监控系统(下)(11-30)
- 另类传感器观念:汽车传感器(3)(11-30)
- 基于GPRS网络的GPS图形导航仪(上)(01-08)
- 基于GPRS网络的GPS图形导航仪(下)(01-08)
- 卫星定位与导航技术(01-23)