用于机动车路考系统的车载通讯系统研究
时间:02-24
来源:中国电子设计网
点击:
摘要: 采用面向对象方法与多线程设计技术开发了一个基于上、下位机串行通信的车载通讯系统,并成功地应用到机动车驾驶人道路考试系统中。本文主要研究了车载通讯系统的软、硬件设计方案,用于揭示车载通讯系统的基本构成及工作过程,具有较高的实用价值。
关键词:串行通信; 车载; PLC;数据采集
随着现代化建设步伐的日益加快,机动车和驾驶员的发展给交通管理部门带来前所未有的更高要求。为把好交通安全的第一关,向社会输送合格的驾驶员,更好的为经济建设服务,研究开发科学可靠的计算机路考系统对机动车驾驶员进行道路驾驶和场地考试,成为交管部门和计算机应用研发单位共同关注的焦点。而车载机通讯系统作为路考试系统中非常关键的一部分。它关系到整个系统能否正常运行和显示,它是各系统之间的桥梁和纽带。它通过车载设备对驾驶人、考试车辆在完全行驶情况进行精确检测定位后,车载通讯系统将考试过程得到的数据以数字信息形式通过无线网传送给主控检测中心,在监控中心通过监测设备和管理软件对整个考试情况进行适时监测和管理,再通过网络对所有考试情况进行统一网络化管理的系统。所以,车载通讯系统的开发和研究就尤为重要了。
1 对车载通讯系统的要求
车载通讯系统在工作过程中需要监测来自于各传感器的车辆状态信息,而监测这些信息的目的是为了了解车辆的工作状态,从而作出相应的处理。因此,车载通讯系统应该满足以下的两点基本要求:
(1)实时性高
一般情况考车起步最多不超过3s,在考试过程中换档时间就更短,一般在1s左右完成,方向盘摆动可在1-2s左右完成,控制周期都在50ms 以内。要真实反映系统"微观"工作过程,车载通讯系统数据采集和更新周期也应在50ms 以内。
(2)信息量大
车载通讯系统在其工作过程中要对发动机、离合器及变速器等单元进行综合监控,需要通过传感器采集各种车辆状态信息,包括:车门信号、安全带信号、手刹信号、倒车信号、离合器信号、主刹车信号、副刹车信号、油门信号、档位信号、发动机转速信号(启动)、里程(速度)信号、汽车方向信号、震动信号、汽车摆正信号等。尽管每次采集的数据量并不是很多,但为充分反映系统的工作状态,需要存储和分析各信号信息;又由前分析得知数据更新周期较短,所以总的信息量大。
2 车载通讯系统总体设计方案
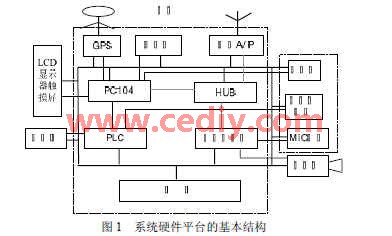
2.1 系统硬件结构设计
考虑到对车载通讯系统应用的要求,采用PC104组件为车载通讯系统的核心部件,作为上位机;车载通讯系统的下位机采用西门子公司的S7-200PLC,上位机和下位机之间通过西门子公司的PC/PPI 通信电缆协议转换器进行连接;系统采用无线局域网与监控中心和基站进行通讯;视屏服务器用于摄取驾驶室内考试过程中的图像信息,转为网络中的数字图像信息,在局域网上传输,以便考试监控中心对整个考试过程进行监控和考试视屏信息备案;GPS为地标定位(检测、标定项目位置和行车轨迹);指纹仪用于识别考生、考官身份;传感器用于检测系统要求的信号,反映出工作状态,在信号的传递过程中要虑除干扰,传感器信号传至PLC或PC104。整个系统的硬件结构图如图1所示。
2.2 系统功能分解
根据系统的硬件结构,可将系统的功能划分为两大部分:下位机的数据采集,处理及数据发送;上位机的数据接收、处理、显示及数据的无线通讯。具体来说,下位机主要功能有:采集车载传感器信号,监控传感器信号状态,根据考试规则,输出逻辑判断代码;接收PC104指令,完成采集和判断的过程。上位机PC104 组件的主要功能有:采集、分析场地项目信号、GPS 信号;作为上位机,管理PLC 工作,接收下位传送的数据并做出相应的处理;对考生、考官信息判断和考试成绩智能分析判定;考生考官信息,考试成绩本地存档并实时上传;管理语音、数据通迅;过程信息的实时动态显示等。
2.3 PC104 和PLC 的连接
上位机PC104 串行口为RS232 接口,而西门子S7-200 型自由口为RS485 通讯口。所以采用西门子公司专用的PC/PPI 编程电缆作为上位机的连接电缆,它实现了RS232 和RS485 的转换,并且具有隔离抗干扰功能,两者之间连接图如图2 所示。

3 车载通讯系统软件开发
3.1 下位机软件开发
3.1.1 PLC 串行口初始化设置
S7-200 CPU 上的通信口工作在自由口模式下是建立在RS-485 半双工硬件基础上的串行通信功能,在自由口模式下,通信协议完全由用户梯形图程序控制。SMB30 被用于选择比特率和校验类型,SMB30 的各位及含义如下:

pp,校验方式:00 和11 均为无校验、01 为偶校验、10 为奇校验;
d,字符长度:0 为传送字符有效数据是8 位、1 为有效数据是7 位;
bbb,波特率:000 为38400baud、001 为19200baud、010 为9600baud、011 为4800baud、
100 为2400baud、101 为1200baud、110 为600baud、111 为300baud;
mm,通信协议:00 为PPI 协议从站模式、01 为自由口模式、10 为PPI 协议主站模式、
11 为保留,缺省设置为PPI 协议从站模式。
本文采用无校验,8 个数据有效位,波特率9600baud,自由口通信。
关键词:串行通信; 车载; PLC;数据采集
随着现代化建设步伐的日益加快,机动车和驾驶员的发展给交通管理部门带来前所未有的更高要求。为把好交通安全的第一关,向社会输送合格的驾驶员,更好的为经济建设服务,研究开发科学可靠的计算机路考系统对机动车驾驶员进行道路驾驶和场地考试,成为交管部门和计算机应用研发单位共同关注的焦点。而车载机通讯系统作为路考试系统中非常关键的一部分。它关系到整个系统能否正常运行和显示,它是各系统之间的桥梁和纽带。它通过车载设备对驾驶人、考试车辆在完全行驶情况进行精确检测定位后,车载通讯系统将考试过程得到的数据以数字信息形式通过无线网传送给主控检测中心,在监控中心通过监测设备和管理软件对整个考试情况进行适时监测和管理,再通过网络对所有考试情况进行统一网络化管理的系统。所以,车载通讯系统的开发和研究就尤为重要了。
1 对车载通讯系统的要求
车载通讯系统在工作过程中需要监测来自于各传感器的车辆状态信息,而监测这些信息的目的是为了了解车辆的工作状态,从而作出相应的处理。因此,车载通讯系统应该满足以下的两点基本要求:
(1)实时性高
一般情况考车起步最多不超过3s,在考试过程中换档时间就更短,一般在1s左右完成,方向盘摆动可在1-2s左右完成,控制周期都在50ms 以内。要真实反映系统"微观"工作过程,车载通讯系统数据采集和更新周期也应在50ms 以内。
(2)信息量大
车载通讯系统在其工作过程中要对发动机、离合器及变速器等单元进行综合监控,需要通过传感器采集各种车辆状态信息,包括:车门信号、安全带信号、手刹信号、倒车信号、离合器信号、主刹车信号、副刹车信号、油门信号、档位信号、发动机转速信号(启动)、里程(速度)信号、汽车方向信号、震动信号、汽车摆正信号等。尽管每次采集的数据量并不是很多,但为充分反映系统的工作状态,需要存储和分析各信号信息;又由前分析得知数据更新周期较短,所以总的信息量大。
2 车载通讯系统总体设计方案
2.1 系统硬件结构设计
考虑到对车载通讯系统应用的要求,采用PC104组件为车载通讯系统的核心部件,作为上位机;车载通讯系统的下位机采用西门子公司的S7-200PLC,上位机和下位机之间通过西门子公司的PC/PPI 通信电缆协议转换器进行连接;系统采用无线局域网与监控中心和基站进行通讯;视屏服务器用于摄取驾驶室内考试过程中的图像信息,转为网络中的数字图像信息,在局域网上传输,以便考试监控中心对整个考试过程进行监控和考试视屏信息备案;GPS为地标定位(检测、标定项目位置和行车轨迹);指纹仪用于识别考生、考官身份;传感器用于检测系统要求的信号,反映出工作状态,在信号的传递过程中要虑除干扰,传感器信号传至PLC或PC104。整个系统的硬件结构图如图1所示。
2.2 系统功能分解
根据系统的硬件结构,可将系统的功能划分为两大部分:下位机的数据采集,处理及数据发送;上位机的数据接收、处理、显示及数据的无线通讯。具体来说,下位机主要功能有:采集车载传感器信号,监控传感器信号状态,根据考试规则,输出逻辑判断代码;接收PC104指令,完成采集和判断的过程。上位机PC104 组件的主要功能有:采集、分析场地项目信号、GPS 信号;作为上位机,管理PLC 工作,接收下位传送的数据并做出相应的处理;对考生、考官信息判断和考试成绩智能分析判定;考生考官信息,考试成绩本地存档并实时上传;管理语音、数据通迅;过程信息的实时动态显示等。
2.3 PC104 和PLC 的连接
上位机PC104 串行口为RS232 接口,而西门子S7-200 型自由口为RS485 通讯口。所以采用西门子公司专用的PC/PPI 编程电缆作为上位机的连接电缆,它实现了RS232 和RS485 的转换,并且具有隔离抗干扰功能,两者之间连接图如图2 所示。
3 车载通讯系统软件开发
3.1 下位机软件开发
3.1.1 PLC 串行口初始化设置
S7-200 CPU 上的通信口工作在自由口模式下是建立在RS-485 半双工硬件基础上的串行通信功能,在自由口模式下,通信协议完全由用户梯形图程序控制。SMB30 被用于选择比特率和校验类型,SMB30 的各位及含义如下:
pp,校验方式:00 和11 均为无校验、01 为偶校验、10 为奇校验;
d,字符长度:0 为传送字符有效数据是8 位、1 为有效数据是7 位;
bbb,波特率:000 为38400baud、001 为19200baud、010 为9600baud、011 为4800baud、
100 为2400baud、101 为1200baud、110 为600baud、111 为300baud;
mm,通信协议:00 为PPI 协议从站模式、01 为自由口模式、10 为PPI 协议主站模式、
11 为保留,缺省设置为PPI 协议从站模式。
本文采用无校验,8 个数据有效位,波特率9600baud,自由口通信。
- 基于AT89C51单片机的CAN/LIN网关设计(04-24)
- 基于串行通信的车载信息采集系统的设计(11-16)
- 语音技术在车载设备中的应用(01-24)
- GSM/GPS车载系统中的LCD中文显示的编程方法(05-12)
- 车辆联网标准让车载视频娱乐和信息系统成为可能(05-12)
- 车载应用领域里蓝牙技术的应用(05-13)