车辆轴载质量动态监测系统的设计与实现
作者:肖海荣 周应兵 周风余
摘 要:介绍了一种基于24位A/D转换器AD7714和AT89S52的两级分布式便携式车辆轴载质量动态监测系统。该系统能够在车辆行驶状态下,实时监测、显示、存储测车日期、车型、车类及相应的轴载质量、总质量,超载信息;并具有查询、打印等功能。投放市场两年来的结果表明,该系统工作稳定、可靠、使用方便,对于有效避免超载现象及由此引发的交通事故,延长公路的使用寿命,起了很大的作用。
关键词:AD7714;车辆轴载质量;超载
1 引言
随着我国经济的迅猛发展,公路运输业成为国民经济中的支柱产业之一,运输车辆的数量也在成几何基数增长。虽然国家明令禁止运输车辆严禁超载,但在利益的驱动下,超载现象屡禁不止,并有愈演愈烈的之势,由此带来的交通事故也是大幅度增长;同时超载对公路的破坏也是越来越严重,国家和人民的生命和财产安全受到极大的威胁。据报道,在山西由于超载造成的路桥损坏一年带来7个多亿的损失;在河北,政府每年需拿出40亿修补超载破坏的公路;在山东、天津等地,超载在给国家带来的损失也是数以亿计;去年一年,死亡十人以上的交通事故58起,超载造成的事故28
起,占50%。血的事实告诉我们,一定要采取一定的措施杜绝超载现象的发生。交通稽查部门对超载车辆的检查一般是通过目测的方式,这就使得许多超载的车辆逃脱了检查,造成了潜在的危险与破坏。车辆轴载质量测定仪正是基于以上实际情况,从方便实用的角度进行研究设计的便携式仪器。只要车辆通过两个很薄、很轻的秤台,就可以测得轴载质量、总质量及是否超载的信息。
2轴载质量测定仪的硬件设计
该便携式车辆轴载质量测定仪是由上位机管理控制系统和下位机检测系统组成的两级分布式计算机控制系统。主要用于交通稽查部门的随时稽查,具有很强的机动性。
2.1 上位机系统的硬件组成及功能
上位机系统的硬件组成如图1所示。该部分的主要功能是,接受牌照、车型、车类等输入信息;接收下位机传递上来的车辆轴载质量信息;同时将该车类型、轴载信息、整车总质量、轴重超载与否、整车超载与否等信息以及测车的日期、时间进行显示、存储、打印,作为管理及处罚的依据;并具有历史记录查询、参数设置、命令下达、管理及使用权限设置等功能。 
2.2 下位机硬件电路设计
2.2.1 A/D转换器选择
标称15吨的称台,满刻度输出电压信号仅8mV,而系统要求的最小分度值仅1Kg,因此,A/D转换器的选择至关重要。为了满足系统要求,经过大量比较、论证,最终,我们选择了美国AD公司推出的一款24位分辨率的多路模数转换器件AD7714。该芯片内集成了缓冲器、时钟发生器、可编程增益放大器、数字滤波器、∑-Δ调制器以及电荷平衡式A/D转换器等电路[2]。
由于AD7714采用了∑-Δ技术实现A/D转换,使它更加不受噪声环境的影响, 具有线性度好、功耗低、增益G=1~128可编程,无须前端信号调理、可编程低通滤波器截止频率等优良特性,非常适合于工业过程控制及便携式仪器应用中温度、压力等高精度测量[3]。
2.2.2 下位机系统硬件电路
下位机系统的硬件电路如图2所示。主要完成对来自压力传感器的信号滤波、A/D转换,接受上位机的命令进行数据上传以及系统系数的标定、存储等功能。
在该部分的硬件设计过程中,除一般的接口设计外,由于信号太微弱,系统的抗干扰设计显得尤为重要,包括传感器激励电源的设计、信号滤波电路的设计,以及AD7714对电源的要求,小信号对印刷电路板的设计要求等等;同时,为进一步提高测量精度,还必须充分考虑传感器的线性度。在该系统中,采用了传统的分段线性化处理,取得了非常理想的效果。 
3 轴载质量测定仪的软件设计
由于系统的程序量比较大,这里仅给出上、下位机的主程序框图,分别如图3和图4所示。 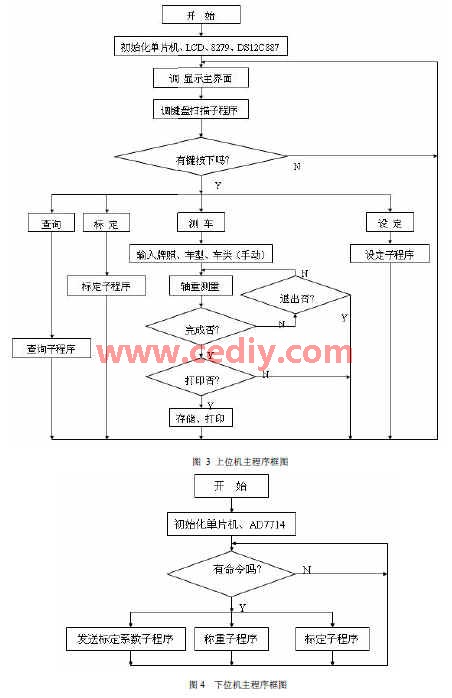
4 车辆行驶速度对测量轴载质量误差影响的试验及分析
a、采用静态测量的方式,即,使车辆的每一轴都分别停在秤台上待静止后测量,并将每一轴的质量求和,测量误差小于0.1%FS。
b、车行速度在5~10km/h的情况下,动态测量误差小于2%FS。
c、 车行速度在10~20km/h的情况下,动态测量误差小于6%FS。
d、 车行速度在20~40km/h的情况下,动态测量误差小于15%FS。
e、 车行速度在40km/h以上的情况下,动态测量误差大于15%FS。 
图5为拟合前后得到的行驶速度与动态测量误差的关系图。
通过分析,造成这种情况的主要原因是车辆行驶的速度越快,对秤台造成的冲击就越大,从而得到的轴载质量超过真值的数量就会增多,而由于采样的速度一定,在车轮通过秤台时采到的有效值就会偏少,这必然会造成误差偏大。针对这一情况,以及图6的采样值曲线,采用单层神经网络拟合的方法,使得在行车速度在40km以下的情况下,误差小于5%,很好地满足了设计的要求。