基于嵌入式的悬架与转向集成控制器研究
时间:05-20
来源:21ic中国电子网
点击:
3. 软件设计
硬件功能的实现需要软件的支持,这里用的软件集成开发环境是ADS1.2(ARM Developer Suite),它是由ARM 公司提供的专门用于 ARM 相关应用开发和调试的综合性软件,用户可用它的CodeWarrior IDE来开发、编译、调试采用包括C、C++和 ARM 汇编语言编写的程序。集成控制软件流程见图8所示,程序开始初始化后进入循环,等待中断,响应后进入中断子程序返回采集信号,ARM对其进行PID控制和模糊处理,输出控制信号到执行机构,同时返回输出信号进行反馈对比。程序中两个关键是PID算法和模糊算法的实现。
为便于在计算机中实现PID控制,当采样信号足够小时,用求和代替积分,用向后差分代替微分,将PID控制方程:

离散化为差分方程得到数字PID控制方程:

式中,Kp,Ki,Kd分别是比例系数、积分系数和微分系数,由仿真整定出这三个参数。
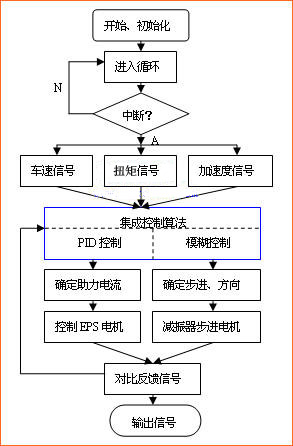
图8 软件流程示意图
在模糊控制子程序中,首先定义模糊控制规则表,再对车身和车轮加速度差值及其变化率进行模糊化,限定论域的饱和值后进行模糊推理,最后反模糊化得到步进电机的方向和脉冲数,进而控制电机的转向和步距角。这里为了易于编程实现,模糊化采用的是三角隶属函数,模糊规则使用最常用的if-then规则,反模糊化采用重心法。
4. 实验与结果分析
完成了软硬件的设计,启动ARM开发板的片内引导装载程序bootloader,配合超级终端,用USB下载编译调试好的集成控制器程序二进制文件,覆盖烧录到ARM的flash,进行控制器的台架实验,见图9所示。测试了某转向状态下集成控制器的助力特性和平顺性,表1所示。

图9 集成控制器及其台架实验
图9 集成控制器及其台架实验
表1 车身垂直振动加速度的控制结果对比
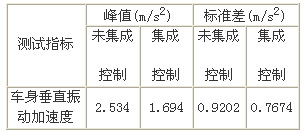
台架试验表明,表征平顺性的车身垂直振动加速度,其峰值和标准差都比未集成的悬架单独控制的结果要小;试验中电机电流响应迅速,助力明显,基本满足设计要求,转向轻便性得到验证;表征操稳性的横摆角速度在台架试验上无法检测。目前,集成控制器的精确性、可靠性检测正在实车试验进行中。
参考文献(References)
[1] 崔海峰,刘昭度,吴利军,等.基于ABS/ASR集成控制系统的汽车坡道起步辅助装置[J].农机化研究,2006,8:193-195.
[2] 张景波,刘昭度,齐志权,等.基于信息融合技术的ABS/ASR/ACC系统仿真[J].计算机仿真,2004,21(6):155-158.
[3] 齐志权,刘昭度,时开斌,等.基于汽车ABS/ASR/ACC集成化系统的ABS参考车速确定方法的研究[J].汽车工程,2003,25(6):617-620.
[4] MA Yue-feng,LIU Zhao-du,QI Zhi-quan,et al.Adaptive Noise Cancellation Method Used for Wheel Speed Signal of Integrate ABS/ASR System[J]. Journal of Beijing Institute of Technology,2006,15(2):144-147.
[5] 赵君卿.汽车主动悬架与电动助力转向结构/控制集成优化研究[D].合肥:合肥工业大学,2005.
[6] 潘继军.基于ARM的嵌入式系统实验分析[J].微计算机信息,2006,2-2:129-132.
[7] 陈奎元,马小平,季学武.电动助力转向系统控制技术的研究[J].江苏大学学报:自然科学版,2004,25(1):21-24.
硬件功能的实现需要软件的支持,这里用的软件集成开发环境是ADS1.2(ARM Developer Suite),它是由ARM 公司提供的专门用于 ARM 相关应用开发和调试的综合性软件,用户可用它的CodeWarrior IDE来开发、编译、调试采用包括C、C++和 ARM 汇编语言编写的程序。集成控制软件流程见图8所示,程序开始初始化后进入循环,等待中断,响应后进入中断子程序返回采集信号,ARM对其进行PID控制和模糊处理,输出控制信号到执行机构,同时返回输出信号进行反馈对比。程序中两个关键是PID算法和模糊算法的实现。
为便于在计算机中实现PID控制,当采样信号足够小时,用求和代替积分,用向后差分代替微分,将PID控制方程:
离散化为差分方程得到数字PID控制方程:
式中,Kp,Ki,Kd分别是比例系数、积分系数和微分系数,由仿真整定出这三个参数。
图8 软件流程示意图
在模糊控制子程序中,首先定义模糊控制规则表,再对车身和车轮加速度差值及其变化率进行模糊化,限定论域的饱和值后进行模糊推理,最后反模糊化得到步进电机的方向和脉冲数,进而控制电机的转向和步距角。这里为了易于编程实现,模糊化采用的是三角隶属函数,模糊规则使用最常用的if-then规则,反模糊化采用重心法。
4. 实验与结果分析
完成了软硬件的设计,启动ARM开发板的片内引导装载程序bootloader,配合超级终端,用USB下载编译调试好的集成控制器程序二进制文件,覆盖烧录到ARM的flash,进行控制器的台架实验,见图9所示。测试了某转向状态下集成控制器的助力特性和平顺性,表1所示。
图9 集成控制器及其台架实验
图9 集成控制器及其台架实验
表1 车身垂直振动加速度的控制结果对比
台架试验表明,表征平顺性的车身垂直振动加速度,其峰值和标准差都比未集成的悬架单独控制的结果要小;试验中电机电流响应迅速,助力明显,基本满足设计要求,转向轻便性得到验证;表征操稳性的横摆角速度在台架试验上无法检测。目前,集成控制器的精确性、可靠性检测正在实车试验进行中。
参考文献(References)
[1] 崔海峰,刘昭度,吴利军,等.基于ABS/ASR集成控制系统的汽车坡道起步辅助装置[J].农机化研究,2006,8:193-195.
[2] 张景波,刘昭度,齐志权,等.基于信息融合技术的ABS/ASR/ACC系统仿真[J].计算机仿真,2004,21(6):155-158.
[3] 齐志权,刘昭度,时开斌,等.基于汽车ABS/ASR/ACC集成化系统的ABS参考车速确定方法的研究[J].汽车工程,2003,25(6):617-620.
[4] MA Yue-feng,LIU Zhao-du,QI Zhi-quan,et al.Adaptive Noise Cancellation Method Used for Wheel Speed Signal of Integrate ABS/ASR System[J]. Journal of Beijing Institute of Technology,2006,15(2):144-147.
[5] 赵君卿.汽车主动悬架与电动助力转向结构/控制集成优化研究[D].合肥:合肥工业大学,2005.
[6] 潘继军.基于ARM的嵌入式系统实验分析[J].微计算机信息,2006,2-2:129-132.
[7] 陈奎元,马小平,季学武.电动助力转向系统控制技术的研究[J].江苏大学学报:自然科学版,2004,25(1):21-24.
- 嵌入式非易失性存储器在汽车系统中的应用(05-13)
- 基于MC9S12DP256的轿车ABS/ASR集成控制系统(02-19)