无线车辆管理调度系统的设计与实现
3 系统的软件设计
3.1 管理调度中心软件
管理调度中心软件流程如图3所示。
 管理调度中心的软件运行于一台扩展 GPRS和WLAN模块的PC机或者小型服务器上,可以随时接入GPRS和WLAN网络,而接入网络后的控制和数据收发则由管理调度软件来控制。图3中未标出软件退出路径,因为实际使用中在任何时刻用户都可以关闭软件而退出管理调度软件系统。
管理调度中心的软件运行于一台扩展 GPRS和WLAN模块的PC机或者小型服务器上,可以随时接入GPRS和WLAN网络,而接入网络后的控制和数据收发则由管理调度软件来控制。图3中未标出软件退出路径,因为实际使用中在任何时刻用户都可以关闭软件而退出管理调度软件系统。
本软件的开发环境为 Visual Studio.NET 2003,采用C语言。软件首先对与GPRS模块相连接的串口进行初始化,同时也检测本机扩展的WLAN模块是否已经找到附近的AP并接入,正常情况下两者的初始化均可在较短时间内完成,然后进入空闲状态。当用户有调度的要求时,则需要首先确定日标车辆的ID(标识符),这个ID既可以是每个车载终端唯一的IP地址或车牌号码,也可以人为地给每个车辆指定一个更容易记忆的ID。随后判断此ID对应的车辆是否处于WLAN网络所覆盖的区域内,这是通过在 WLAN网络上向该车载终端发送一个查询信息来实现的。如果车辆在WLAN网络中,那么车载终端立即向调度中心发送消息确认自己处于WLAN网络中,此时软件则优先使用WLAN与车辆进行通信;如果车辆不在WLAN网络中,那么无法收到调度中心的查询信息,因而也无法向调度中心回复确认消息,此时调度中心将使用GPRS与车辆通信。使用GPRS的过程中涉及到一个移动IP的问题:车载端每次拨号连接上GPRS网络时,其IP地址一般都不一样,所以无法采用 WLAN网络中的IP地址与车辆绑定的方法。此时常用的解决方法是调度中心采用短信方式,首先要求车载终端上报其IP地址,然后再进行通信。当管理调度中心的指令发出后,软件则等待车载端回复确认消息。通过车辆确认的方法,可以确保车辆准确地收到了管理调度中心发出的指令,使得系统的误操作概率最小。
3.2 车载终端软件
车载终端软件运行在基于XScale PXA255的嵌入式车载终端上,采用WinCE.Net 4.2作为操作系统。将不同的车辆管理调度系统中存在很大差异的具体业务内容剥离,即可得到如图4所示的车载端软件流程图。图中未标出软件退出路径,因为实际使用中在任何时刻用户都可以关闭软件而退出车载终端软件系统。
本系统的车载端应用软件采用Visual Studio.NET中的Smart Client工程模式进行开发,使用C语言。如图4所示,本软件首先进行初始化的工作,将GPRS/WLAN/GPS所在的各个端口打开,开始供电。对于 GPRS模块,上电后则会自动搜索GSM网络。如果所在位置有GSM网络覆盖,则自动接入并稳定在可以随时拨打/接听电话和收发短信的空闲状态;如果无 GSM网络覆盖,则定时重新搜索网络。对于WLAN模块,上电后通过驱动程序控制其开始搜索WLAN网络,如果搜索到合适的AP则自动接人并设定加密认证信息,以防止被攻击;如果未搜索到,则定时重新搜索网络。对于GPS模块,冷启动后,在4 800 bit/s默认波特率上输入控制命令,调整波特率至9 600 bit/s,同时通过命令控制GPS在后面的工作中每隔一个固定时间间隔输出一次定位信息,本软件所设定的这个时间间隔为1 s。考虑到民用GPS在非差分模式下普遍的定位误差在1 m~15 m,所以这个时间精度可以满足绝大多数应用的要求。
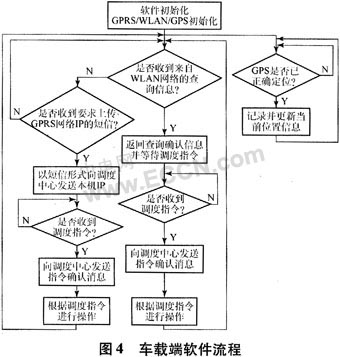
在初始化后,软件则启动两个工作线程,分别用来处理GPS定位信息和无线网络信息。其中处理GPS信息的线程首先要判断是否已经有效定位。根据实测,如果 GPS模块是初次使用或者放置较长时间后使用,此时模块内部备电已耗尽,因此无法为冷启动后的定位提供最近一次位置信息做参考,此时有效定位需要5 min~10 min。其他情况下冷启动到有效定位大约需要10 s。有效定位后,此线程通过串口每秒接收一次GPS模块输出的当前位置、速度、时间等信息,并进行相应的处理和记录。处理无线网络信息的线程则主要负责协调GPRS和WLAN网络,使得车载终端能够有效、可靠地与管理调度中心进行通信。此线程首先扫描WLAN 网络上与调度中心事先商量好的某个端口上有无查询信息,若有,则返回查询确认信息并等待实际指令;在收到指令之后首先向调度中心返回确认消息,然后再根据指令内容做相应动作。如果在查询阶段未找到合适的AP接人,则查询GPRS模块有没有收到调度中心发来的短信。如无,则重新回到扫描WLAN网络的状态;如有,则说明调度中心需要与本终端通过GPRS进行通信,那么车载终端应该立即拨号连接上GPRS网络,并将获得的IP地址以短信形式回传给调度中心。之后的通信流程与WLAN网络类似,也是车载终端与管理调度中心通过指
- 基于GPRS网络的GPS图形导航仪(上)(01-08)
- 基于GPRS网络的GPS图形导航仪(下)(01-08)
- 车辆定位监控系统移动终端的设计(10-02)
- 基于GPS 和GPRS 的多功能汽车记录仪的设计(11-02)
- GPRS_ZigBee技术的公交车智能监控系统(06-14)
- 基于GPS&GPRS车辆实时监控系统的设计(08-21)