模糊控制在汽车离合器中的应用
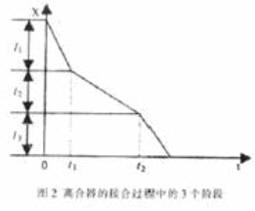
(1)空行程阶段l1:此阶段用于消除离合器对偶摩擦面的间隙,对于车辆和离合器都没有任何影响,应尽快结束。(2)滑磨阶段l2:该阶段主从动片产生滑磨,开始产生扭矩且扭矩逐渐增大,直到克服最大的滚动阻力,使车辆开始运动。在此阶段内离合器对接合品质的影响最大。
(3)同步接合阶段l3:在该阶段中,滑磨停止,扭矩不再增长,离合器对接合品质已无任何影响,应尽快结束。
第一阶段和第三阶段在各种情况下对车辆和离合器均无任何影响,要求离合器快速结合,要精确控制的只有第二阶段即滑磨阶段。实际上,滑磨阶段又可以分为两个阶段:第一阶段为从消除间隙后到摩擦力矩等于负载力矩的时刻,此时车辆处于将要运动的一瞬间;第二阶段为从车辆开始运动到离合器主从动轴同步为止。如果把车辆开始运动时离合器的行程定为半结合点,那么,离合器半接合点的值是随负载的不同而变化的。路面阻力大,半接合点的值相应较大;反之,路面阻力小,半接合点的值相应较小。目前半接合点的精确测量是一个难点,现有的测量方式都在不同程度上造成离合器控制的超调。计算半接合点如果采用传统算法是无法建立起它的数学模型的,针对这个特点,用模糊控制的方法计算半接合点是比较理想的。因此,将离合器的半接合点定为模糊控制的输出之一。
(b)离合器结合速度车辆从开始运动到离合器主从动轴完全同步阶段,离合器结合速度的控制至关重要。因为不论从顺应驾驶意图方面考虑或从离合器使用寿命方面考虑,这一阶段的控制都影响整个控制过程的效果。如果驾驶员的意图是希望车辆快速起步,这一阶段的结合速度就必须加快;如果驾驶员的意图是希望车辆平缓起步,这一阶段的结合速度就必须放慢。因此,本阶段离合器的结合速度也定为模糊控制的输出参数。
(三)控制过程分析
车辆起步时离合器的控制是一个非线性的过程。模糊控制能根据系统的一些特性;依据丰富而较合理的经验进行直觉推理,在线确定和改变控制策略。
首先根据采集到的油门踏板位移值及其变化率,将它们分别模糊量化。模糊量化就是将精确的数字量转换为模糊量,即将输入的精确量转变成为与之相应的隶属函数。隶属函数有钟形,梯形,三角形等形状,一般认为钟形最好,但难于计算;三角形次之,最后是梯形。在这里,为了计算方便,选用的是三角形隶属函数。油门踏板位移及其变化率的隶属函数如图3、图4所示。 
μ1为油门踏板位移隶属度,μ2为油门踏板位移变化率的隶属度;X为油门踏板位移值的大小,Y为油门踏板位移变化率的大小。X和Y均取为从0~100之间变化是为了计算隶属度时方便。具体计算模糊控制输出时再将它们换算成为实际值。再将输出参数进行模糊化处理,如图5、图6所示。 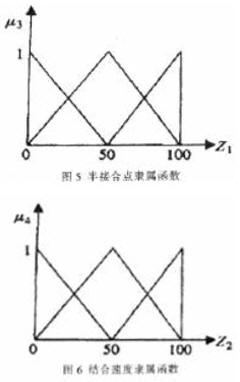
其中μ3为半接合点隶属度,μ4为结合速度隶属度;Z1为半接合点的值,Z2为结合速度的值。同样道理,为了计算隶属度的方便,半接合点的值和结合速度的值都先取从0~100之间变化,具体计算最后输出时再换算过来。
然后建立起一系列模糊推理规则。这里有2个输入参数,各种不同输入参数的组合将得到不同的输出。模糊推理规则是依据离合器的寿命目标函数和优秀驾驶员的经验来确定的。
在离合器的整个接合过程中,应该做到接合平顺、柔和,同时应该减少滑磨功,使磨损尽可能小,延长离合器的使用寿命。这是对离合器使用性能提出的要求。为了评价这两个要求,可以分别建立他们的目标函数。
(a)接合平顺性目标函数。对接合平顺性影响最大的是离合器接合时引起的传动系扭矩波动,所以,可把车身的纵向加速的变化率,即冲击度j作为评价指标。

式中:TOT-变速器输出轴转矩
io-变速器输出轴至驱动轮传动比
IW-与变速器输出轴相连的惯量
rr-驱动轮半径
j与离合器接合扭矩的导数成正比,波动值dTot/dt越大,j也越大,j能较好地反映离合器接合过程的动力学本质。因为主要研究的是怎样使车辆自适应驾驶员的意图起步,有时为了快速起步而不得不以牺牲冲击度为代价,所以考虑更多的是离合器的寿命目标函数。
(b)离合器寿命目标函数:离合器寿命目标函数是这样定义的:离合器在接合过程中,主要元件与从动元件一直经历由转速不等到转速一致的滑磨过程,离合器频繁的接合和滑磨,使摩擦片很容易磨损,滑磨产生的热量使压盘和飞轮元件温度升高,加剧摩擦片的磨损,降低离合器的使用寿命。因此可以滑磨功来评价离合器的使用寿命。离合器接合过程中,希望滑磨功越小越好,故目标函数为: 
式中:Tc-离合器摩擦力矩
We、Wn-发动机、离合器从动轴角速度
W-滑磨功
从上式中可以看到,当离合器摩擦力矩一定时,滑磨时间越长,滑磨功越大。所以从控制滑磨功大小,防止滑磨功过大的方面考虑,在阻力较大的路面上起步时必须限制滑磨时间。另一方面,油门踏板位移较大和油门踏板位移变化率较大时除了可能是路面阻力较大外,也有可能是驾驶员希望快速起步,尽管此时冲击比较大,这时对离合器的结合要求也是希望快速结合。
依此类推,从考虑到离合器的寿命和依据驾驶员的经验可以得出一组模糊推理规则,从而建立一个模糊推理规则表。
具体的参数输入后,通过模糊推理规则表的处理以及运用Mamdani模糊推理方法,得出模糊的输出结果。
模糊推理完成后进行的模糊计算的最后一步:反模糊化处理,这里使用的是重心法。经过批模糊化处理后得到模糊控制输出参数的精确值,精确值可以用来控制离合器的结合过程。
模糊控制用于车辆起步离合器的控制是非常有效的,它能够解决车辆系统难以建立数学模型和难以精确控制的问题,它的控制效果是令人满意的。
三、结束语
模糊控制理论的产生和发展,不是控制理论从确定思维的倒退,而是螺旋式的前进;不是用精确性完全取代模糊性,而是承认精确性向模糊性的逼近,是模糊思维在控制理论领域的重现。
它是沟通人类模糊化自然思维和机械的精确思维之间的科学桥梁,它为我们解决巨人系统、人-机系统和人工智能等问题提供了有效的工具和手段。
- 电子技术的革新先锋(11-21)
- 现代汽车电子技术综述(06-24)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- RFID技术在商用汽车生产及使用中的应用(05-11)
- 如何利用可编程器件设计车用显示系统(08-30)
- 基于安全性的汽车电子技术的应用(05-12)