基于MC9S12DP256的轿车ABS/ASR集成控制系统
时间:02-19
来源:半导体应用
点击:
汽车驱动防滑系统(Anti-slip Regulation System,简称ASR|0">
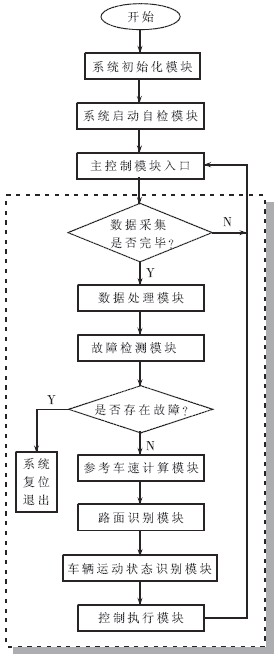
图4 ABS/ASR集成控制系统软件框图
系统初始化模块在系统上电复位时对系统进行初始化。初始化内容包括MCU内部的时钟、各端口设置、串行通讯接口、模拟和数字通道、看门狗定时器、系统变量等,以保证MCU正常运行。另外还包括对集成系统的执行机构进行复位,确保车辆的安全行驶。启动自检模块是在系统初始化后对关键软、硬件部分进行静态检测,以判断系统的软、硬件工作是否正常。如果发现集成控制系统中存在故障,故障警示灯会持续点亮。
主控制模块为ABS/ASR集成控制系统的控制主程序,见图4中阴影虚线框。主控制模块通过实时中断RTI做固定周期20ms的循环,连续调用故障诊断模块、数据处理模块、参考车速计算模块、路面识别模块和车辆运动状态识别模块,实时进行车辆运动状态和外界环境的判断。然后依据车辆当前的运行状态,由控制执行模块分别进行ABS或ASR的逻辑门限值控制。
考虑到驾驶员制动动作与ASR制动干预控制的紧急切换需要,设计了制动踏板中断服务程序。当采集到制动踏板触发的中断时,进入制动踏板中断服务程序,如果集成控制系统处于ASR工作方式,立即退出当前控制,对执行机构模块进行复位,恢复常规制动方式,不干预驾驶员的制动动作,保证了车辆行驶的安全性。
3 试验结果与分析
利用所开发的采集系统[4]和本文所设计的ABS/ASR集成控制系统,在捷达GTX试验车上进行了典型工况ABS和ASR试验,验证其控制效果。
ABS试验选择在干柏油路面、制动初速度为50km/h的条件下进行,图5为带有ABS控制的直线制动过程。图中显示了车辆左前轮速度变化的过程,在整个制动过程中与车速都能够比较好地逼近,车轮的滑移率也被控制在比较理想的区域内,保证了车辆制动过程中方向的稳定性。
图5 带有ABS控制,干路面,初速50km/h条件下的直线制动
图6 ASR对开路面上左右两侧驱动轮轮速比较
图7 ASR对开路面上左右两侧驱动轮滑转率比较
ASR试验选择一挡对开路面起步过程,右侧车轮位于低附着系数路面上。图6为起步过程中左右两侧驱动轮转速对比,其中曲线1为右侧驱动轮车速,曲线3为左侧驱动轮车速,曲线2为非驱动轮车速,可近似认为是车身速度。可以看到起步初期,右侧驱动轮发生明显的滑转,在33.5秒附近ASR开始调节,车轮的滑转明显改善。图7为起步过程中左右两侧驱动轮滑转率的变化曲线,更明显地反映出进行ASR控制后,右侧滑转驱动轮的滑转率被控制在较为理想的范围内。同时,由于制动干预的影响,左侧驱动轮的滑转率略有上升。通过实车试验,说明ABS/ASR集成控制系统中的ABS和ASR功能都取得了比较理想的控制效果,为其它底盘主动安全控制系统的集成创造了条件。
- 基于XC164的六通道ABS开发板设计(11-25)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(上)(11-30)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(中)(11-30)
- 楔式制动器设计提高了线控刹车的性能(01-04)
- 智能大电流功率开关可有效降低汽车电子系统成本(01-09)
- ANSOFT产品在汽车电子及系统设计中的应用(01-19)