采用MPC5200实现高速视频探测的车内应用
该信号将通过IRQ线连接到MPC5200,帧传输需要由MPC5200 PCI控制器驱动,信号时序如图3所示,具体步骤如下。 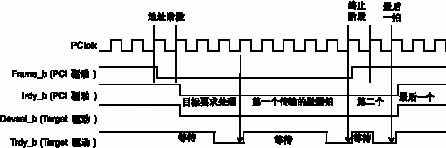 ● MPC5200 PCI使Frame_b输出低电平,以开始进行处理。AD线由MPC5200通过地址信息进行驱动。接口逻辑可以忽略这一阶段。
● MPC5200 PCI使Frame_b输出低电平,以开始进行处理。AD线由MPC5200通过地址信息进行驱动。接口逻辑可以忽略这一阶段。
● MPC5200 PCI 使Irdy_b输出低电平,以启动数据阶段。AD线仍然由MPC5200推动,直到目标(接口逻辑)判断Devsel_b"要求"该处理。
● 只要目标保持Trdy_b处于高状态,MPC5200 PCI就能使AD总线处于三态之一(tri-state),并保持在等待状态。
● 在任何刚出现的PCIclk边缘,其中Trdy_b被探测为低,PCI就会捕捉到数据并认为要传输一个数据拍。
● 在完成了下一个到最后一个数据拍后,MPC5200 PCI使Frame_b输出低电平,这表示正在请求最后一个数据拍。
● 当目标传输完最后一个数据拍(以Trdy_b变低为标志)后,MPC5200 PCI使Irdy_b输出低电平,处理完毕。
● 还有其他一些信号与PCI处理有关,但它们用于PCI传输错误的情况中,在本应用中不作要求。
如果HCLK与PCIclk的比率为2:1,则PCIclk与接口逻辑的连接就没有必要。如果PCIclk与HCLK的比率为4:1的话(人们更期望这样),需要一个触发器来延迟和缩短PCI信号Trdy_b的持续时间。
当兼容3.3伏的CMOS摄像机传感器三态其数据总线时,传感器的数据线路就与PCI AD总线进行直接、有效的连接。否则,在这一设计中需要数据转发器。在对传感器的LineValid信号进行判断时,该传感器只应该驱动数据线路。图4是27MHz的PCIclk与13.5MHz(或相似频率)HCLK的2:1逻辑关系图。 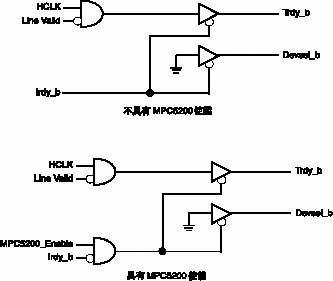 只有在没有其他真正的PCI目标设备连接到PCI接口上时,该示例接口才发挥作用。否则,某些支持的类型需要通知接口逻辑响应即将到来的PCI处理。
只有在没有其他真正的PCI目标设备连接到PCI接口上时,该示例接口才发挥作用。否则,某些支持的类型需要通知接口逻辑响应即将到来的PCI处理。
33MHz的PCIclk和8.25MHz(或相似频率)的HCLK的2:1逻辑关系如图5所示。 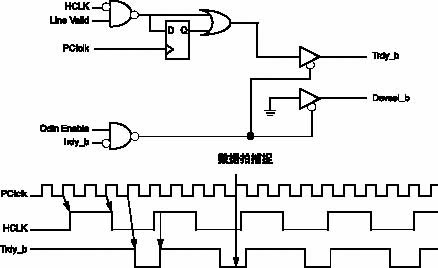 ● 在2:1的情况中,当HCLK低时,传感器数据有效,并随HCLK的再次出现而作为下一个数据拍,下一个出现的PCIclk边缘就会捕捉数据。
● 在2:1的情况中,当HCLK低时,传感器数据有效,并随HCLK的再次出现而作为下一个数据拍,下一个出现的PCIclk边缘就会捕捉数据。
PCI处理必须在LineValid判断之前进行。PCI处理在LineValid变高时,一直由Trdy_b保持等待状态。由于5200的使能信号要求拒绝几次循环,在PCI处理结束时可能还需要额外的电路来关闭此电路。在这一过程中,人们可能会要求进行非摄像机的PCI处理(该接口逻辑绝不能响应)。
● 由于HCLK源自MPC5200 PWM,HCLK处理发生在PCIclk边缘后(根据设计,PCIclk应提前到达总线)。
● 当HCLK下降时,Trdy_b的判断要延迟一个PCIclk。
● 当HCLK升高时,Trdy_b也立刻升高。
● 在PCIclk边缘创建了PCI数据拍捕捉,然后,PCIclk边缘再创建不断上升的HCLK,因为像素在不断增加。
控制传感器数据读取的BestComm任务非常灵活,能根据传感器的大小进行调节。在基于飞思卡尔CMOS传感器的本例中,传感器的分辨率为640×480像素,每像素10bit。在每一行后面,脉冲停止,BestComm任务会自动开始下一行的读取,直到完成整幅图片。这种方法具有很高的帧速率,每行的开销为15个时钟。
传输640像素数据的开销为640个时钟,加上一行的开销15个时钟,则传输一行像素的总开销为655个时钟。每帧画面有480行,则所需的时钟为655×480=314400。如果采用33MHz的PCI时钟,则传输每帧画面需要9.52ms,即每秒可传输105帧。从这里可以看出,帧速率取决于时钟和传感器的分辨率。
为完成一幅完整的图片而读取的脉冲的长度和行数,就是BestComm的参数,这些参数可以根据每种传感器的类型进行调整。采用接口实现的帧吞吐量比该应用的帧速率要高得多。限制因素是用于算法所需的计算能力,该算法与应用的关系非常紧密。
- MPC5200在汽车高速视频探测中的应用(07-02)
- 指纹产品在汽车领域里的应用(02-22)
- 直接式胎压监测系统的设计(02-22)
- 汽车电动助力转向系统的技术分析(02-19)
- 利用高速ADC设计用于汽车的LIDAR系统(02-23)
- 基于铁电存储器的高速和高保真的汽车事故实时数据记录仪(03-23)