汽车电子的嵌入式设计与发展方向
嵌入式系统是泛计算领域的重要组成部分,是嵌入式对象宿主体系中完成某种特定功能的专用计算机系统。嵌入式系统有体积小、低功耗、集成度高、子系统间能通信融合的优点。随着汽车技术的发展以及微处理器技术的不断进步,在汽车电子技术中得到了广泛应用。目前,从车身控制、底盘控制、发动机管理、主被动安全系统到车载娱乐、信息系统都离不开嵌入式技术的支持。
1 汽车嵌入式系统发展历程
嵌入式系统诞生于微型机时代,经历了漫长的独立发展的单片机道路[2]。嵌入式系统的核心是嵌入式微处理器。与嵌入式微处理器的发展类似,汽车嵌入式系统也可以分为三个发展阶段:
第一阶段: SCM(Single Chip Microcomputer)系统。以4位和低档8位微处理器为核心,将CPU和外围电路集成到一个芯片上,配置了外部并行总线、串行通讯接口、SFR模块和布尔指令系统。硬件结构和功能相对单一、处理效率低、存储容易小、软件结构也比较简单,不需要嵌入式操作系统。这种底层的汽车SCM系统主要用于任何相对简单、数据处理量小和实时性要求不高的控制场合,如雨刷、车灯系统、仪表盘以及电动门窗等。
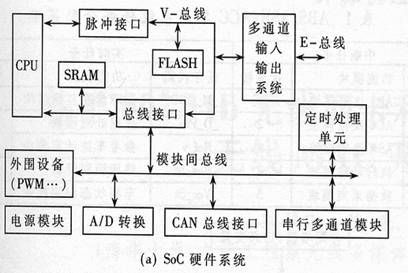
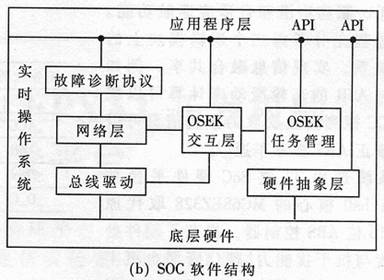
图1 汽车嵌入式SoC系统结构
第二阶段:MCU(Micro Controller Unit)系统。以高档的8位和16位处理器为核心,集成了较多外部接口功能单元,如A/D转换、PWM、PCA、Watchdog、高速I/O口等,配置了芯片间的串行总线;软件结构比较复杂,程序数据量有明显增加。第二代汽车嵌入式系统能够完成简单的实时任务,目前在汽车电控系统中得到了最广泛的应用,如ABS系统、智能安全气囊、主动悬架以及发动机管理系统等。
第三阶段:SoC(System of Chips)系统。以性能极高的32位甚至64位嵌入式处理器为核心,在对海量离散时间信号要求快速处理的场合使用DSP作为协处理器。为满足汽车系统不断扩展的嵌入式应用需求,不断提高处理程度,增加存储容量与集成度。在嵌入式操作系统的支持下具有实时多任何处理能力,同时与网络的耦合更为紧密。汽车SoC系统是嵌入式技术在汽车电子上的高端应用,满足了现代汽车电控系统功能不断扩展、逻辑渐趋复杂、子系统间通信频率不断提高的要求,代表着汽车电子技术的发展趋势。汽车嵌入式SoC系统主要应用在混合动力总成、底盘综合控制、汽车定位导航、车辆状态记录与监控等领域。
2 汽车嵌入式SoC系统
2.1 技术特点
汽车嵌入式SoC系统是嵌入式系统向实时多任务管理、网络耦合与通信的高端应用过渡的产物,大大提高了汽车电子系统的实时性、可靠性和智能化程度。除了具备普通嵌入式系统的共有特性之外,它还具有以下几个优点:
(1) 对实时多任务管理有很强的支持能力,中断响应时间1~2μs;
(2) 具有很强的存储区保护功能;
(3) 在嵌入式实时操作系统的支持下能合理进行任务调度,充分利用系统资源;
(4) 硬件结构和软件功能都有很强的扩展能力,系统集成度大大提高,降低了成本;
(5) 超低功耗,汽车静态功耗为豪瓦级;
(6) 系统硬件抗干扰能力增强,适应高温、潮湿、振动和电磁辐射等各种工作环境;
(7) 实时操作系统支持软件多线程结构,增强了系统的软件抗干扰性;
(8) 提供强大的网络通信功能,具备地IEEE1394、USB、CAN、Bluetooth或IrDA通信接口,支持相应的通信组网协议软件和物理层驱动软件,提供容错数据传输能力和更大通信带宽。
2.2 系统结构
汽车嵌入式SoC系统由硬件和软件两大部分组成。硬件包括嵌入式处理和外围设备,软件包括应用软件和操作系统。软件通过数据结构、算法和通讯协议实现汽车电子控制策略,硬件则为软件提供了运行平台,执行具体控制。
嵌入式SoC硬件系统集成度越来越高,一般为模块化结构,如图1(a)所示。在高性能CPU核心外通过IP总线扩展实时时钟模块、SRAM(静态随机存储器)及大容量FLASH,配置CAN总线与USB通信模块,无缝集成PWM输出、多通道串口、A/D转换接口与统一的高速缓冲存储器,支持RISC技术、多级流水线技术与在片调试技术。系统的实时处理能力、可靠性和网络通信能力大大增强。
现代汽车电子系统从单一控制逐渐发展到多变量多任务协调控制,软件越来越庞大,越来越复杂,使得嵌入式系统需要寻找新的软件解决方案。图1(b)描述了汽车嵌入式SoC系统软件的典型结构。它采用基于标准化接口和通讯协议的模块化软件设计,系统内部通讯由交互层直接完成,保障应用程序间的信息传送。网络层拥有数据流处理能力,是不同系统层面间信息交换的中间接口,能最大程度地整合系统资源。嵌入式实时操作系统摒弃了传统操作系统的前后台模式,使用总线驱
- 2012年EDA产业趋势预测 SoC功能验证将成为主要议题(01-19)
- 2011年电视半导体市场增长势头减弱,SoC销售额下降(02-13)
- 2011年台湾厂商横扫对手,主宰电视SoC市场(03-01)
- 系统级芯片SoC真的能取代传统CPU?(04-26)
- 欧胜推出业界首款四核高清音频处理器SoC (06-04)
- 实践9号B卫星SoC芯片小如指甲 实现全套大脑功能(11-01)