矢量调制分析基础
信号是理想的( 没有误差),在解调该输入信号后应该得到的基带I-Q 数据,也称为IQ 参考时间。假设原始的数据序列可以被恢复,I-Q 参考波形从I-Q 波形恢复的数据比特中采用数学方法导出。I-Q 参考波形的产生开始于恢复已解调I-Q 测量波形的实际符号比特,随后重建理想的I 和Q 状态序列。这些状态再作为理想的脉冲,并根据参考信道滤波进行基带过滤,从而生成一个理想的I-Q 参考波形。然后对比I-Q 测量波形与I-Q 参考波形,分析输入信号的质量。从已测波形中减去参考波形得到误差矢量波形,或I-Q 误差波形。这种方法能够揭示非常微小的信号变化,并能转化为信号的质量信息,这些信息是传统调制质量测量方法所不能提供的。
测量概念
现在已解释了一些数字调制基础和VSA 的系统原理,下一步是了解关于数字调制分析测量结果与用于系统故障诊断的轨迹轨迹显示。下面的例子显示了QPSK ( 正交相移键控) 的测量结果,调制信号的符号速率是50 ksym/s, α 等于0.35 的根升余弦基带滤波器。正交表示载波信号在相差90°的相位状态之间转换。信号以90° 为增量在45° 到135°、-45° 或-135° 变化。QPSK 有四个可用状态。每个状态分配一个0 ~ 3 的二进制值,这要求每个状态有2 个比特,也就是每符号两个比特。只要两个I 值和两个Q 值就可生成四种状态,同时满足双比特码元的要求。
矢量 ( 或IQ) 图
矢量示意图,通常更多地称为数字调制的IQ 图,显示了时间上各个时刻所恢复的复杂I-Q 基带信号。它显示了信号状态以及信号在符号之间移动时的跳变过程。从原点到矢量示意图上某个点绘制的矢量线对应着此刻的瞬时电压。
图11a 显示了前面提到的QPSK 调制信号的IQ 图示例。IQ 图显示了4 个理想的状态位置( 以十字表示),分别是45°、135°、-45° 和-135°。还有已检测的符号和符号间的跳变。IQ 图给出了峰均电压比,它可用于确定放大器的压缩情况。

图11. QPSK 量图和星座图
矢量图解释
在I-Q 平面上查看信号时,记住你是在观察信号相对载波的幅度和相位。未调制的载波是相位参考(0°)。图11 中,每个检测的符号都是相对未调制载波以不同的幅度和相位进行调制,但频率与载波一致。如果检测到符号频率与未调制载波的不同,它的表象是信号相对未调制载波连续增加或减小相位似的移动。还有,数字调制属于三维测量,根据I ( 同相)/Q ( 正交)分量与时间的关系进行调制。而IQ 图仅是二维图,所以与I-Q 平面( 或CRT屏幕) 垂直的时间参数无法显示。
星座图
图11b 显示了与前面相同的QPSK 信号的星座图。星座图显示了与符号时钟同步的载波幅度和相位。这些测量点通常就是检测判断点,代表已检测的符号。它与I-Q 图类似,只是不显示状态间的跳变轨迹轨迹。
理想状态下,所有符号都应显示为单点,并集中在理想状态位置处( 以十字坐标显示)。理想状态是指信号没有误差时的符号位置。不过由于信号的损伤及其它调制误差会造成偏差,符号会分散在理想状态位置的周围。
89600B VSA 允许你在理想状态周围放置一个定义好的误差限制圈。显示的实际已检测符号与理想状态可以帮助您直观地了解信号质量。星座图有助于识别幅度不平衡、正交误差或相位噪声等信号损伤。
误差矢量幅度(EVM)
在数字通信系统中应用最为广泛的调制质量指标是误差矢量幅度(EVM)。误差矢量是指在给定时间的理想参考信号和所测信号之间的矢量差。参见图12。误差矢量是一个复参量,包含幅度和相位分量。不要将误差矢量幅度与幅度误差、误差矢量相位与相位误差相混淆。
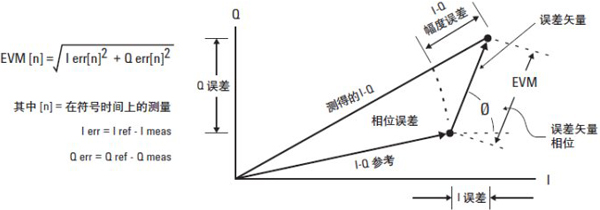
图12. 误差矢量幅度(EVM); 实际测得的信号与理想参考信号的差异
EVM 定义为在符号时钟跳变时刻误差矢量的均方根(rms)。按照惯例EVM 通常归一化为最外面符号的幅度或符号平均功率的平方根。EVM 测量在有些通信标准中也称为相对星座误差(RCE),各种相关数据结果对于任意
数字调制格式中影响信号的幅度和相位轨轨迹路的损伤都十分敏感。因此,EVM 是一种分析诊断通信系统基带、中频或射频部分中的故障的理想测量工具。
图13 是图12 中定义的调制质量测量的示例。误差矢量时间数据( 轨迹A) 是根据I-Q 测量信号和I-Q 参考信号上相应符号点计算出的误差矢量幅度。误差矢量频谱数据( 轨迹B) 显示了误差矢量时间数据的频谱。也就是说,误差矢量时间数据被加窗并FFT 以生成误差矢量频谱轨迹。这种格式能够揭示使得制载波偏离理想路径的多余信号的频谱成分。如果这些误差成分是确定的,它们会以频谱轨迹的形式显示在误差矢量频谱上。测量这些频谱,可以