基于SRAM/DRAM的大容量FIFO的设计与实现
部由行列地址译码、多块大容量存储单元阵列和一些逻辑控制模块组成。
3.3程序设计
这里,主要采用2.3中设立头尾两个指针的思想。与SRAM不同的是,DRAM采用的矩形存储单元阵列是由行线和列线来控制,并且内部采用分块结构.这里HY57V281620E由4块存储单元组成.通过BA1和BA0来控制。在写数据操作的时候,当存放数据长度超过当前存储单元容量时,需要CPLD切换至下一存储块进行存储,同样,读操作的时候也存在这种操作,即如果StartPos或者EndPos超过了存储块容量.这里是2 097 152,则通过一个模4计数器控制切换至下一个存储块。
3.4时序控制
写入(或读出)数据的时候,CPLD需要模拟FIFO基本的写(或读)操作时序:CPLD接收到nWEN(nREN)和WCLK(RCLK),即当。nWEN(nREN)为低,WCLK(RClK)为上升沿时,将当前I/O上的数据写入(读出)。在数据写入(读出)RAM的时候,CPLD应按照HY57V281620E器件的写(读)时序来控制写(读)操作:CPLD首先控制nRAS从高电平变至低电平,选择行地址。再通过控制nCAS选择列地址。这里,当写入(或读出)数据在同一块当中进行,可以保持nRAS低电平,连续选择多列数据操作(也称作快页模式读写)。当数据地址超过块容量,则需要重新选择行地址,然后再进行连续多列数据读写操作。读写使能控制和SRAM类似,通过nOE和nWE(低有效)来控制。
图5是DRAM主要读写控制时序。可以看出,影响所构建FIFO读写速度的主要因素是tPC,这也是决定DRAM速率的关键所在,因此,所构建FIFO的理论速度也应该接近DRAM最高频率。同时,还必须考虑DRAM的刷新操作。这里,系统采用nCAS先于nRAS的方式(CBR),即控制nCS、nCAS、nRAS,并保持nWE为高电平,利用芯片内部计数器决定要被刷新的行。HY57V281620E提供了这种自刷新模式,刷新速率由tREF来决定,通常为64 ms。在系统或某存储块长时间无操作的情况下,需要定时刷新,以保持数据完整。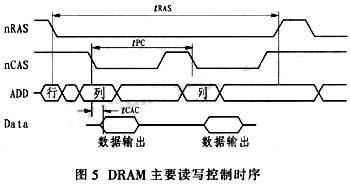
4实验结果和分析
图6是用QuartusIl4.0根据2.3中设立的头尾指针算法设计仿真出来的时序波形。可以看出.系统从0x000底开始写数据,当写入3个数据时。EndPos增加到0x003,再进行3个数据读操作,即StartPos增加到0x003,此时,所构建的FIFO是读空状态,可以看到读空信号Empty在这时变为高电平,达到FIFO设计所需要求。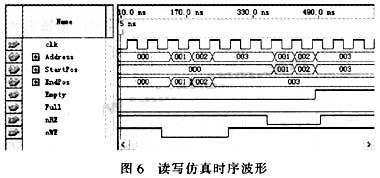
还需要注意:由于所采用的RAM只采用一个数据总线作为输入输出,因此在写数据的时候不能进行读操作。而常用FIFO器件可以同时读写。所以.如果要在同一时间内进行读和写操作,那么需要在一个FIFO读写时钟周期内对RAM进行读写等多个操作,这时所构建的FIFO速率将降低。
此外.在与DRAM构建高速FIFO时,由于存储块选择需要一定时间操作,因此跨块存储操作在频率较高时会影响正常的数据读写,出现个别数据丢失情况。而且当某段时间进行刷新操作时,有突发数据需要读或写,这时不允许中断。解决这种问题的办法是用一个I/O引脚(nREADY)标识出当前所构建的FIFO是否可读写,如果有上述情况发生,则nREADY为高,可以读写时为低。
常用的FIFO器件还有半满、接近满、接近空等状态指示,可以在上述构建FIFO的基础上加上简单的逻辑控制,计算StartPos和EndPos之间的差值,根据当前是写操作还是读操作来指示。其他状态信号也可以通过CPLD经由逻辑运算很方便地实现。同时,读和写同步时钟可以不一致。这样就可以很方便地构成同步或者异步两种FIFO,具有很好的可扩展性。
5 结束语
现在,SRAM的数据传输速率可以达到10 ns以内,DRAM要比SRAM稍慢一些。因此。SRAM通常用于高速缓冲存储.而DRAM则通常用来存储较大的数据。从成本来考虑,DRAM比SRAM成本要低得多。
采用本文给出的结构和设计思想,避免了以往主CPU接管RAM时的一系列复杂读写操作,而直接类似FIFO使用,接口简单方便,而且避开了传统FIFO器件容量和成本的限制。本文通过理论分析,实际电路设计调试,已成功实现用两种不同结构的RAM构建FIFO,并应用于多个实时高速信号采集系统中。
- 利用Virtex-5 FPGA实现更高的性能(04-29)
- 如何采用FPGA协处理器实现算法加速(04-29)
- Virtex-5 系列概述LX、LXT 和 SXT 平台(07-27)
- 高效FIFO串口双机通信在ARM7上的实现(06-20)
- 基于DSP-dMAX的嵌入式FIFO数据传输系统设计(04-16)
- 一种使用USB对ADSP_TS101S进行链路口加载的方案(10-18)