基于模糊控制的远程康复信息采集系统设计
时间:03-24
来源:EDN
点击:
3.2 信息采集控制系统的软件设计
目前,模糊控制器构造有三种技术:采用传统的单片机或微型机作为物理基础,编制相应的软件实现模糊推理和控制;用单片机或集成电路芯片构造模糊控制器,利用配置数据来确定模糊控制器的结构形式;采用可编程门阵列构造模糊控制器。由于远程康复系统现场站点需要一台微机作为接收远方的控制命令和处理来自摄像机的图像信息并通过Internet来传送信息,所以为了充分利用和节省资源,我们采用微机作为物理基础,编制相应的软件实现模糊推理和控制。
模糊控制的上位机软件设计主要就是模糊控制算法的设计和实现,同时也包括微机与单片机的串口通讯部分和与Internet接口部分的设计实现。其程序流程如图4所示。
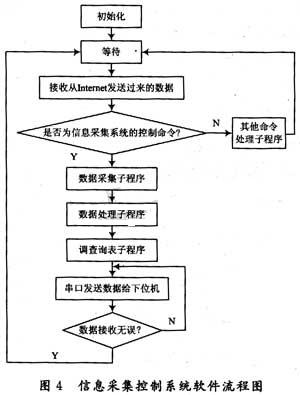
该部分主要实现对信息采集系统的模糊控制功能。系统运行前,该上位机程序首先要进行初始化,设置串口,为系统正确运行做好准备。当远程控制命令通过Internet传送到现场站点的PC机,经过模糊控制算法的处理,再经串口将命令下达给单片机控制系统来执行。此控制过程不需要现场站点的人员来操作,完全采取远程控制,这样远程专家就能很方便地根据需要控制信息采集系统的运行,同时也方便了现地医师或病人家属,减少了由于远程专家和现地医师或家属的交流障碍而引起的操作错误。
4 结语
本系统利用模糊控制技术解决了对远程康复信息采集系统的远程智能控制,使位于远方的康复专家和辅助设计师能够通过Internet方便地遥控现地的信息采集系统以合适的方式和角度准确、实时地进行数据信息的采集,供诊断和辅助产品设计之用。试验证明,该控制系统达到了我们的设计要求,能够远程实时地进行三维视觉信息的采集。
目前,模糊控制器构造有三种技术:采用传统的单片机或微型机作为物理基础,编制相应的软件实现模糊推理和控制;用单片机或集成电路芯片构造模糊控制器,利用配置数据来确定模糊控制器的结构形式;采用可编程门阵列构造模糊控制器。由于远程康复系统现场站点需要一台微机作为接收远方的控制命令和处理来自摄像机的图像信息并通过Internet来传送信息,所以为了充分利用和节省资源,我们采用微机作为物理基础,编制相应的软件实现模糊推理和控制。
模糊控制的上位机软件设计主要就是模糊控制算法的设计和实现,同时也包括微机与单片机的串口通讯部分和与Internet接口部分的设计实现。其程序流程如图4所示。
该部分主要实现对信息采集系统的模糊控制功能。系统运行前,该上位机程序首先要进行初始化,设置串口,为系统正确运行做好准备。当远程控制命令通过Internet传送到现场站点的PC机,经过模糊控制算法的处理,再经串口将命令下达给单片机控制系统来执行。此控制过程不需要现场站点的人员来操作,完全采取远程控制,这样远程专家就能很方便地根据需要控制信息采集系统的运行,同时也方便了现地医师或病人家属,减少了由于远程专家和现地医师或家属的交流障碍而引起的操作错误。
4 结语
本系统利用模糊控制技术解决了对远程康复信息采集系统的远程智能控制,使位于远方的康复专家和辅助设计师能够通过Internet方便地遥控现地的信息采集系统以合适的方式和角度准确、实时地进行数据信息的采集,供诊断和辅助产品设计之用。试验证明,该控制系统达到了我们的设计要求,能够远程实时地进行三维视觉信息的采集。
- 基于FPGA的电涡流缓速器控制系统(11-26)
- 基于DSP和模糊控制的寻线行走机器人设计与实现(05-16)
- 基于AT89S52的双模糊温度控制器设计(10-12)
- 锂离子电池组监控系统研究与实现 — 模糊故障诊断(01-26)
- 基于PCI总线的STM32运动控制卡的设计(01-21)
- 基于嵌入式ARM-Linux无线ZigBee协调器驱动设计(11-02)