基于ARM与MEMS器件的微惯性测量装置设计
速度信息的基础上,能够实现载体的多种运动状态信息的测量。
设采样周期为T,v(k)为kT时刻的速度,x(k)为kT时刻的位移,a(k)为kT时刻的加速度,a(k)为加速度的连续真值,则有下列求解速度的积分公式:
区间[kT,(k+1)T]内所包的面积。己知加速度在kT、(k+1)T时刻的采样值为a(k)和a(k+1)可以把加速度a(t)在时间区间[kT,(k+1)T]内所包围的形状近似为一矩形或梯形,采用梯形更精确一点,如图2所示。
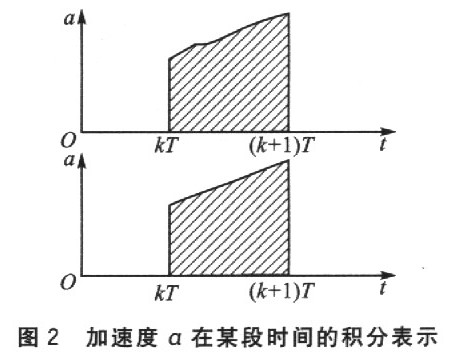
因而上式可以近似为:

已知A/D采样周期为t,在某时刻T1时载体的角速度为w1,线加速度为a1,线速度为v1。经过一个采样周期t后,在T1+t时刻载体的角速度为w2,线加速度为a2,线速度为v2,在该采样周期t中载体转过的角度为α,载体的位移为s,则有:
通过积分计算即可得到载体的角度、速度、位移等信息。
5 应用
5.1 系统集成
微惯性测量装置由处理器单元模块和传感器单元模块组成。两模块通过板问总线连接,相错放置,以最大限度地利用空间,达到微小化的尺寸要求。装置采用7.2V锂电池供电。最终封装后的装置重量仅为25g。
采用NI公司的LabWindows/CVI软件开发了上位机数据处理软件。数据处理软件读取微惯性测量装置采集的速度信息,生成速度/角度,位移曲线,得到载体的摆角、振幅值。
5.2 SPC-III机器鱼尾鳍拍动参数测量实验
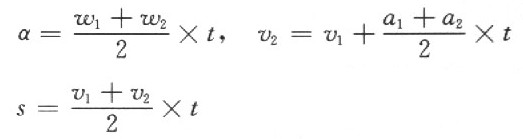
利用该微惯性测量装置对北京航空航天大学机器人研究所ITM实验室开发的SPC-III机器鱼进行了机器鱼尾鳍拍动参数的测量实验。微惯性测量装置安装于机器鱼尾鳍尾柄处,测量装置的采集频率设定为1kHz。SPC-III机器鱼以1Hz频率稳定拍动情况下,采集的数据经上位机数据处理软件处理,可得到SPC-III机器鱼的尾鳍拍动参数:拍动频率1Hz,摆角幅度41.70°,振幅97.368mm,最大角速度124.264(°)/s。角速度曲线如图3、图4所示。
由表1可知,测量数据与理论设计数值相差不大。造成误差的可能原因:陀螺与加速度计本身存在误差偏值,其中包括零位误差和动态误差等;机器鱼尾鳍拍动机构不是非常精密,存在偏差。
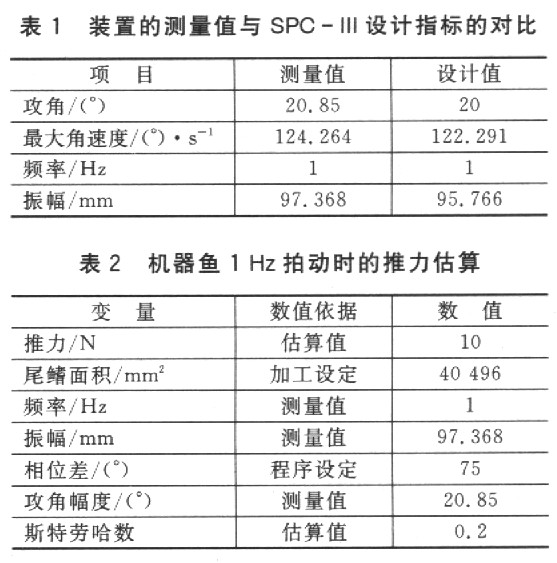
根据鱼类尾鳍推力的估算方法,估算得到SPC-III机器鱼以1 Hz频率拍动时尾鳍产生的平均推力为10 N,如表2所列。
SPC-III机器鱼采用的两关节并联机构尾鳍推进器可以产生几十牛的推力,实际推力与估算推力基本符合,初步验证了基于理想推进器理论和动量定理的尾鳍推力估算方法。在不具备水洞模型试验、CFD水动力计算仿真的条件下,利用该方法能够快速、简便地得到尾鳍推力的估计值,或反解尾鳍的运动参数。这种推力估算方法已经成功地运用于北京航空航天大学ITM实验室SPC系列机器鱼的设计和实验工作中。
结语
利用一种基于MEMS器件的微惯性测量装置,可进行SPC-III机器鱼尾鳍拍动参数的精确测量。微惯性测量装置体积小,质量轻,功耗低,可得到载体的加速度、角速度、速度、位移、角度等运动信息,可应用于生物运动测量、体育运动测量、人体健康监测等多种领域。