基于ARM与MEMS器件的微惯性测量装置设计
1 设计要求和系统结构
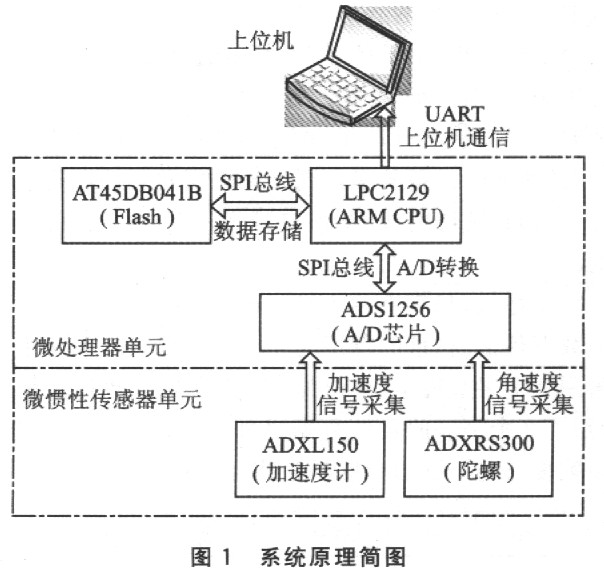
根据活体鱼类的生物特征和实验本身的特点,微惯性测量装置应该满足下列设计要求:体积小,质量轻,功耗低,采集频率和采集精度高,防水密封性能良好。为了实现这些需求,微惯性测量装置的硬件由两部分组成:①微处理器单元;②微惯性传感器单元。微处理器单元主要包括微处理器、A/D转换芯片和Flash。微处理器作为核心单元,通过SPIl口连接A/D转换芯片完成数据采集,通过SPIO口连接Flash完成数据存储,通过串口与上位机通信。微惯性传感器单元是由MEMS加速度计和MEMS陀螺所组成的,完成加速度与角速度的原始信息采集任务。采集的原始信息经过A/D转换处理后,写入Flash芯片中保存,或通过串口直接发送至上位机进行处理。系统原理简图如图l所示。
2 微处理器单元
2.1 LPC2129处理器
本装置既要求微处理器具有一定的处理能力又要求功耗低、体积小,所以选用Philips公司的LPC2129。LPC2129基于一个支持实时仿真和跟踪的16/32位ARM7TDMI-SCPU,并带有16 KB片内SRAM和256KB嵌入的高速片内Flash存储器。LPC2129具有LQFP64的较小封装、极低的功耗、多个32位定时器、4路10位ADC、9个外部中断、最多可达46个GPIO等。
在LPC2129的软件设计上,未采用ARM上常用的uC/OS-II或uClinux操作系统,而是使用前后台式的定时中断结构。这种前后台式的定时中断结构更适于实时性要求很高的控制系统,可以保证控制回路延迟均在一个设计确定的范围内,并且各个模块问优先级关系十分明确,使用起来较为方便。
2.2 A/D转换采集芯片ADSl256
A/D转换芯片采用美国TI公司的24位串行模/数转换器ADSl256。其可提供高达23位的无噪声精度,数据速率最高可达30 ksps。ADSl256采用四线制SPI通信方式,与LPC2129的SPIl接口相连,可以灵活方便地进行通信。
ADS1256采用多通道循环采集的工作方式。在数据准备信号DRDY提示可以提取数据后,首先将当前的采集通道变为下一个采集通道,开始新的采集转换,然后再马上提取A/D转换寄存器中的数据(这时的数据其实是上一轮转换好的数据)。这种方式在实现提取数据的同时进行新数据的采集转换,是一种高效率的工作方式。
2.3 Flash芯片AT45DB041B
Flashl选用Atmel公司的可编程串行存取芯片AT45DB041B。主存储单元分为2048页,每页264字节;具有2个264字节静态随机存储器作为数据缓冲器。
AT45DB04lB与LPC2129的SPI0接口相连,采集的数据首先写入Flash的缓冲区2中,再将缓冲区里的数据写入Flash的主存页面进行保存,待离线的数据分析处理。
3 微惯性传感器单元
微惯性测量装置的MEMS传感器单元由微机械陀螺和微加速度计组成,可精确测量载体的一个轴向角速度信息和一个轴向加速度信息。
3.1 ADXRS300单角速度陀螺仪
ADXRS300是美国模拟器件公司生产的基于MEMS技术的角速度传感器。ADXRS300采用+5V电源供电,测量偏航角速度的范围是±300rad/s,灵敏度为5mV/(rad·s-1),零位输出电压为2.5V。通过外部电阻和电容可分别设定测量角速度的范围、带宽及零位输出电压。采用BGA-32封装技术,外围尺寸仅为7mm×7mm×3mm,重量仅0.5g。
设被测量的角速度为αv,单位为(°)/s;输出电压为Uo,单位为mV;灵敏度K为5mV/(°)·s-1,零位输出电压为2.5V,则有关系式:

3.2 ADXLl50单轴加速度计
ADXL150是美国模拟器件公司生产的基于MEMS技术的单轴微加速度传感器。ADXL150的主要性能特点:零位输出偏置电压为Us/2,测量范围为±50g,灵敏度系数为38mV/g,非线性度0.2%,零加速度漂移为O.2g;4~6V供电均可工作;功耗很低,静态电流只有1.8~3.5mA。
设被测量的加速度为av,单位为g;输出电压为Uo,单位为mV;灵敏度为K,单位为mV/g;电源电压为Vs,单位为mV,则有关系式:

4 速度、角度、位移的测量原理
角速度与加速度信息经过积分计算处理后,可以得到角度、速度、位移等信息,故该装置在可测量载体角速度与加