你真正理解 pin to pin delay吗?
时间:10-02
整理:3721RD
点击:
管脚到管脚延时是指在驱动器端状态的改变到接收器端状态的改变之间的时间。这些改变通常发生在给定电压的50%,最小延时发生在当输出第一个越过给定的阈值(threshold),最大延时发生在当输出最后一个越过电压阈值(threshold) ,测量所有这些情况。
你理解了这里的“第一个”和“最后一个”吗?
[ 本帖最后由 forevercgh 于 2008-4-14 11:54 编辑 ]
logic delay
从输入端的时钟触发到输出缓冲器被触发的时间间隔
[ 本帖最后由 forevercgh 于 2008-4-21 16:51 编辑 ]
手册中的数据是基于这个Vref测量得到的(线性情况下),但实际系统如果遇到这里的非线性边沿,那么这时Vref你又是如何确定呢?通常我们的做法就是将Vil和Vih作为Vref,这也就牵涉到了最大和最小飞行时间的问题。
其实好多东西是需要深入研究的
[ 本帖最后由 forevercgh 于 2008-4-21 14:37 编辑 ]
你理解了这里的“第一个”和“最后一个”吗?
[ 本帖最后由 forevercgh 于 2008-4-14 11:54 编辑 ]
这里的第一个和最后一个就是指最小飞行时间和最大飞行时间。
Tco
指时钟触发开始到有效数据输出的器件内部所有延时的总和。Tco 包含缓冲延时buffer delay和逻辑延时logic delay
propagation delay
信号在传输线上的传输的延时我们称为传播延迟(propagation delay),它只和信号的传播速度和线长有关
buffer delay
缓冲延时是指信号经过缓冲器达到有效的电压输出所需要的时间
flight time
飞行时间包含了传播延迟和信号上升沿变化这两部分因素包括最大飞行时间(Max Flight Time)和最小飞行时间(Min Flight Time)。
logic delay
从输入端的时钟触发到输出缓冲器被触发的时间间隔
[ 本帖最后由 forevercgh 于 2008-4-21 16:51 编辑 ]
没人知道吗?
做以这些定义是为了实现timing adjustment,而这里的调整都是基于AC test condition。
datasheet中的所提供的时序参数是基于这个AC test condition,测量点为(Vref)Vmeas。但我们在实际使用的过程中需要根据不同的系统平台进行timing compensation和pin -to -pin delay的确定。
实际系统中由于反射,串扰等因素的存在,你的信号边沿可能就是非线性的,如果非线性的区域时发生在(Vref)Vmeas,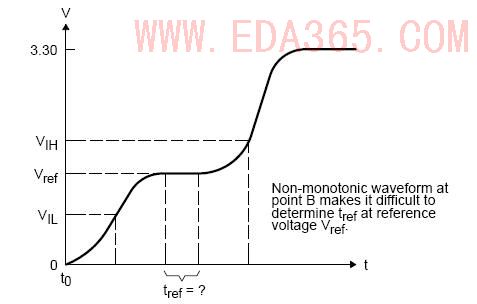
手册中的数据是基于这个Vref测量得到的(线性情况下),但实际系统如果遇到这里的非线性边沿,那么这时Vref你又是如何确定呢?通常我们的做法就是将Vil和Vih作为Vref,这也就牵涉到了最大和最小飞行时间的问题。
其实好多东西是需要深入研究的
[ 本帖最后由 forevercgh 于 2008-4-21 14:37 编辑 ]
讲的很好 简单明了
小编,有进一步学习资料么。讲的很简单,我无法与时间设计联系起来。
哪里不懂啊?
学习了