基于FPGA的组合导航系统
项目背景及可行性分析
1.项目名称、项目的主要内容及目前的进展情况
项目名称: 基于FPGA的组合导航系统
项目的主要内容及目前的进展情况:本项目主要研究基于MicoBlaze导航处理器的组合导航的作用原理及其实现。目前已经完成大部分软件程序的编制,现已完成外围电路模块的研制工作。
2.项目关键技术及创新点的论述;
(1) 采用低成本MEMS加速度计和陀螺仪设计惯导单元。
(2) 引入3轴磁阻传感器解决惯导单元的初始对准问题。
(3) 采用GPS+IMU+COMPASS的结构来设计自主导航系统。
(4) 多传感器冗余技术,满足多种需要。
(5) 采用气压计获得高度信息。
(6) 基于MEMS惯性器件的初始对准。
(7) 采用Labview设计系统演示界面。
3.技术成熟性和可靠性论述:
微型惯性传感器与传统的惯性传感器相比,具有体积小,重量轻,成本低,功耗低,可靠性高和寿命长等优势。在车辆导航和控制,机器人,无人机导航,武器制导等领域有着广阔的应用前景。然而目前其精度还比较低,导致其应用受到一定的限制。GPS接收机与微型惯性测量单元的结合可以取长补短,大大提高输出数据更新率,防止导航定位误差随时间积累,并且提高了可靠性和抗干扰能力,为低成本,轻小型导航与制导系统提供了一个非常有吸引力的方案,成为设计者的最佳选择,也是目前导航定位技术发展的主要方向之一。
目前购买一套国外的低成本的组合导航装置的价钱也在10万元以上,为了降低成本使导航装置更加符合车辆等民用场合的导航。我们采用ADI的低成本的加速度计和陀螺仪利用PowerPc处理器设计了一个完备的导航系统。
项目实施方案
1.方案基本功能框图及描述
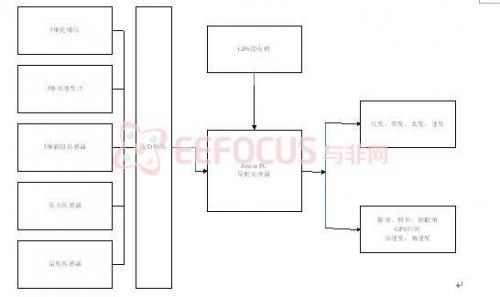
2.需要的开发平台
经过详细的分析论证本方案采用Spartan-3E开发平台进行设计完全可以满足系统的需求。
3.方案实施过程中需要开发的模块
本方案中需要研制惯性导航单元,主要包括电子罗盘模块,压力计模块,加速度模块,陀螺仪模块和温度模块。以上模块都采用自己购买相应元器件进行开发的方式进行。
4.系统最终要达到的性能指标
论述本项目最终完成时所设想达到的目标。
本方案最终要达到一下目标
精确而实时位置坐标。
不受动态学影响的高精度航向角。
经气压高度表校正后的精确海拔高度。
精确的沿着3个轴向的速率和加速度。
精确的3个轴向角速度。
需要的其它资源
1.设计输入输出功能子板
子版采用SPI接口与主板通信,输出口采用主板上的串行口进行输出。
2.测试设备
测试设备目前仅有万用表、示波器这两个设备。
3.方针、开发工具
ISE,Embedded Development Kit (EDK) and Platform Studio,modsim。
- 德州仪器推出具备n因数与串联电阻校正功能的+/-1℃远程与本地温度传感器(09-15)
- 基于FPGA的超声波液体密度传感器(07-05)
- 基于FPGA的司机眼球跟踪疲劳检测报警系统(07-05)
- 智能手机传感器管理,FPGA比AP+MCU方案功耗低10倍(10-11)
- 采用MEMS麦克风实现复杂环境下对特定语音的提取与放大(06-02)
- 多款陀螺仪表头设计、平台测试、系统研究方案及应用实例(06-28)