采用MEMS麦克风实现复杂环境下对特定语音的提取与放大
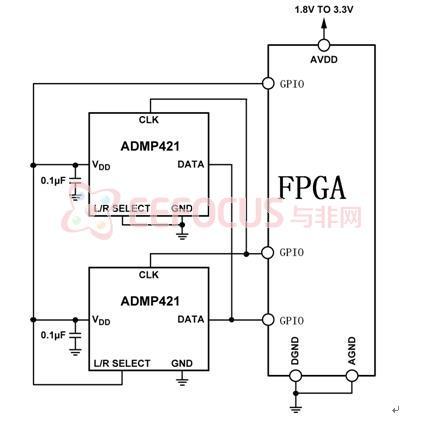
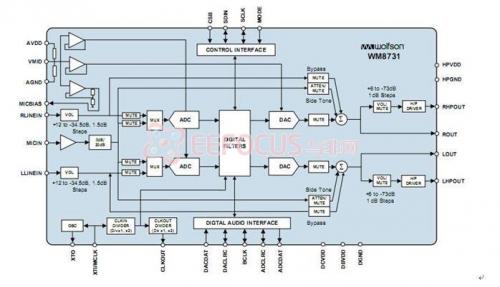
由SPI控制模块读取语音信息,将声音信号采集进系统进行进一步处理。人机交互可以设置语音处理的各项初始参量,确定语音阈值,实现用户自定义的语音处理,增强系统对环境的适应性。之后,语音信息被送往FIR处理单元,进行下一步的滤波处理,初步将语音信号提取出来。这时,可以利用OR1200构建的CPU进行进一步的软件处理,以实现更为复杂的语音处理。经过相关处理的语音信号,可以直接通过MCU控制和IIS控制输出给WM8731进行音频解码输出。如果需要较大功率输出,可以使用音频放大电路将音频信号放大输出。 另外,由于FPGA内部的存储器较小,且为易失性的,所以需要外扩存储器存储程序以及用户设定信息。如果需要运行操作系统,则需要外扩RAM以保证程序执行所需存储器和提高程序执行效率。 图 1 SOPC语音增强系统构架 3.单元模块设计 3.1 软核OR1200 OR1200是OpenCores组织提供的基于GPL协议的开放源代码处理器,性能介于ARM7和ARM9之间,适合一般的嵌入式系统使用。OpenCores组织提供了大量的源代码IP核供研究人员使用,OR1200在使用0.18um及6层金属工艺时,主频可以运行在300MHz,可以提供300Dhrystone、2.1MIPS和300次的32x32 DSP乘加操作。OR1200是32位标量RISC处理器,具有哈佛结构、5级整数流水线、支持MMU和Cache,带有基本的DSP功能。外部数据和地址总线采用Wishbone片上总线标准。 3.2组合麦克风 目前市面上,最为流行驻极体麦克风(ECM),但硅麦克风大有取而代之的趋势,这主要由于硅麦克风有驻极体麦克风不可比拟的优势。硅麦克风就单个器件来说,半径是驻极体麦克风的 1/3 或 1/4,尺寸大大减小,有更高的集成度。能耗为 ECM 的 1/2。不仅如此,硅麦克风有更强的抗射频干扰(RFI)和电磁干扰(EMI),可以在恶劣的电磁场环境正常工作,同时能够承受表面贴装工艺的高温度而性能不变。MEMS麦克风[5]非常适合麦克风安保和监视应用,可同时改善采集和波束成型体验。ADMP421[6]可以提供一流的SNR和扩展频率响应,音质出色,声音高度清晰,适用于高清语音/声音识别。器件间的容差极小,增强了波束成形的方向性,同时卓越的PSRR和小封装尺寸使设计人员可以极其灵活地放置麦克风。 另外ADMP421数字麦克风有着尘埃过滤器,工作性能不会随着时间的推移而下降。 ADMP421与FPGA的接口为通用的SPI串行控制方式,控制方式比较简单。 图 2 ADMP421典型接口电路[7] 3.3 WM8731音频输出模块 WM8731[8]是一款专用低功耗立体CODECs,内置了耳机驱动。该芯片是专门为MP3播放器设计的,音频采样和播放的芯片,其原理图如下: 图 3 WM8731原理图[8] 该芯片支持立体声输入和播放,内置时钟发生器,支持多种时钟模式,通过一个12MHz时钟,该器件可以直接生成44.1kHz、48kHz和96kHz等采样率,以及MP3标准定义的其他采样率,完全不需要一个独立的锁相环(phase locked loop)或晶振。音频采样和播放采用24位AD和DA,控制信号可用IIC协议和SPI协议,数字音频信号输入输出可采用Right justified 、Left justified ,IIS和 DSP 四种模式。 4.1. 硬件设计 本系统使用组合麦克风得到语音信号[9]。系统将使用6个背靠背的ADMP421并使用隔音效果比较好的垫片将它们隔离,这样就可以构成简单的差动结构,差动输出的信号就可以简单的消除来自不同方向的噪声干扰。 4.2. 相位调制 由于声音信号是有一个比较宽的频率范围,大致在300Hz-3400Hz[10],虽然ADMP421体积较小,但是它们收到的声音信号相互之间还是存在着相位差的。例如,两个麦克风之间相距0.5cm,由于声音的传播速度是340m/s(室温下),那么其传播时间相差即为14.7微秒,其相对应的频率即为68K Hz。那么频率为17K Hz的信号就会因为相差90°的相位,而不能由差分的信号消除。而在别的频率的信号也会由于相位差的原因而出现不同的相减差别。在相位接近180°的情况下,甚至会出现噪声增强的现象。 所以,在本系统中,首先要进行距离匹配,使各路信号基本实现相位之间的匹配。下面给出两个具体的方案:①采用频域的分析方法,将语音信号解析,然后根据麦克风之间的距离计算相位差,之后补偿。②在数据流中加入数字滤波器,使滤波器的相频相应恰恰可以补偿相位差。前者较为精细,处理效果好,但是要耗费大量的系统资源;后者是较为通用的方案,虽然不能实现完全的匹配,但是效果还是可以接受的。 4.3用户特色语音设定 由用户预先在较为安静的环境中进行麦克风测试。用户对着主麦克风说话,然后由内部的匹配算法,将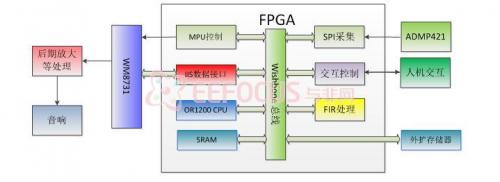
MEMS麦克风 语音提取 FPGA ADMP421 相关文章:
- 利用MEMS麦克风改善移动设备声学性能(06-11)
- 楼氏电子公司MEMS麦克风侵犯ADI公司专利权(11-27)
- ADI公司在MEMS麦克风专利案中胜诉(10-25)
- 数字MEMS麦克风明年将超过模拟产品(02-15)
- 楼氏电子SiSonic MEMS麦克风出货量突破30亿大关 (04-18)
- MEMS麦克风不给力,鑫创:赚钱不容易(07-20)