基于有机气敏变色材料的传感器系统
响的12%。最后可以得到,敏感阵列对每种气体的颜色响应矩阵,即气体的特征矩阵:
式中:下标1,2,3分别表示左上,右上,和右下颜色块的平均R,G,B值(左下颜色块由于响应不明显被抛弃)。
具体做法如下:
(1)先用Photoshop软件对每一个硅胶板通气前和通气后的图像进行图像分割,对每幅图像,分别剪取3个颜色块的内接正方形并保存,这样就在不丢失图像信息的情况下把图像分割成了3幅小图像以利于后面的处理。
(2)用Matlab软件编写程序提取图像信息并进行数据分析,这里求出了各种气体的特征矩阵,并用它们组成了识别气体的数据库,然后用欧氏距离作为衡量各气体相似度的标准,利用式(1)计算气体两两间的距离。
式中:x,y代表通入的不同的气体;i可取1,2,3,意义同气体特征矩阵的下标。
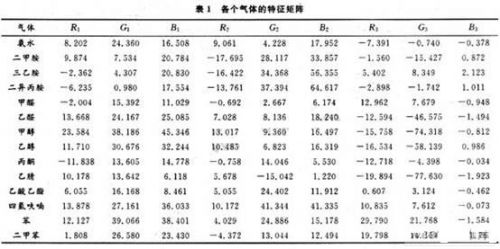
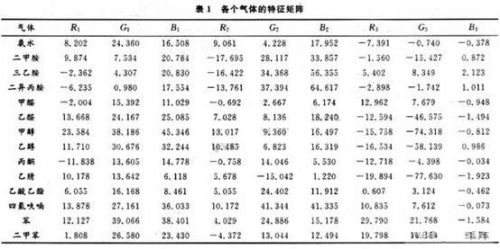
通过求特征矩阵两两间距可以看出各气体间的差别较大,可以用该方法对易挥发有机气体进行识别。可选最小的两两间距23.323的1/2为阈值,用于判断辨别的气体是否有效。各个气体的特征矩阵见表1。
2.3 算法设计
首先,进行图像的采集和预处理。图像采集包括敏感阵列通气前和通气后两幅图像的采集和保存;图像的预处理包括通气后的图像与通气前图像的做差求出敏感阵列对气体的颜色变化图像和对颜色变化图像的去噪。
然后,提取图像信息。这一部分可分为两步:第一,提取图像颜色块的的位置信息,即通过检测图像中圆的方法求出图像所含圆形颜色块圆心的坐标;第二,获得相应位置上的颜色信息,即求出以相应圆心为中心、边长为15个像素大小的小正方形中像素的平均R,G,B值,得到待测气体的特征矩阵。
对于第一步,在检测圆之前应该先把RGB图像灰度化,二值化,然后再进行边缘检测,最后利用Hough变换就可求出图像中所含圆形圆心。
检测圆一般用到的算法是Hough变换,Hough变换是Paul Hough在1962年提出的一种图像边缘检测技术,它可以检测图像空间中的任意解析曲线,并具有对局部缺损不敏感、对随机噪声的鲁棒性以及适于并行处理等优良特性,所以这里选用Hough变换进行圆的检测。Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题,也即把检测整体特性转化为检测局部特性。例如图像空间中的在同一个圆,直线,椭圆上的点,每一个点都对应了参数空间中的一个图形,在图像空间中这些点都满足它们的方程这一个条件,所以这些点,每个投影后得到的图像都会经过这个参数空间中的点。也就是在参数空间中它们会相交于一点。所以,如果参数空间中的这个相交点的累加值越大,那么说明原图像空间中满足这个参数的图形越饱满,越像要检测的东西。算法的基本思想如下:通过参数空间的选择,Hough变换可以检测任意的已知表达形式的曲线,而参数空间的选择可以根据曲线的表达式确定。所以当检测某一已知半径的圆的时候,可以选择与原图像空间同样的空间作为参数空间。那么原图像空间中的一个圆对应了参数空间中的一个点,参数空间中的一个点对应了图像空间中的一个圆,原图像空间中在同一个圆上的点,它们的参数相同,即圆心(x,y)相同,那么它们在参数空间中的对应的圆就会过同一个点(x,y),所以,将原图像空间中的所有点变换到参数空间后,根据参数空间中点的*程度就可以判断出图像空间中有没有近似于圆的图形。如果有,这个参数就是圆的参数,继而找到了圆的圆心坐标。对于圆的半径未知的情况下,可以看作是有3个参数的圆的检测,圆心和半径。这个时候原理仍然相同,只是参数空间的维数升高,计算量增大。图像空间中的任意一个点都对应了参数空间中的一簇圆曲线,其实是一个圆锥型。参数空间中的任意一个点对应了图像空间中的一个圆。
这里,考虑到实际需检测圆的半径变化不是很大,可以假定圆的半径在一定数值范围,以这个范围做个循环来进行已知半径的圆的检测,从而减小运算量,提高系统的识别效率。如图2,图3所示。
最后,计算距离,得出结论。将待测气体的特征矩阵分别与数据库中各气体的特征矩阵用式(1)求距离,并记录下最小距离和对应的气体,此时即可认定记录下的气体和待测气体最为接近。若该最小距离小于阈值,则可判定待测气体即为记录下的气体;否则,可判断待测气体于数据库中不存在。
2.4 传感系统的完成及功能测试
为了能最终完成气体的检测识别,并且使系统方便携带,降低成本,后端的图像采集,图像处理和算法的运行都应在嵌入式系统上进行。考虑到