蓝牙技术在短距离无线遥控中的应用
时间:06-13
来源:21IC
点击:
短距离无线电遥控有很大的应用需求,但由于射频电路的设计和调试较为复杂,对人员和设备的要求较高。因而限制了其使用范围。
蓝牙|0">蓝牙技术提供低成本,短距离的无线通信。支持点对点,一点对多点的双向数字传输。工作在2.402~2.480GHz的ISM频段。数据速率 1Mb/s,纠错编码采用1/3率的重复码,2/3率的汉明码,跳频频率数79个频点,跳频速率1600次/秒,发射距离 Class2级的模块为10m左右,Class 1 级的模块可达100m。
将蓝牙模块用于无线电遥控系统,把无线射频部分的工作交由蓝牙模块完成。使遥控系统设计变得简单方便。
无线遥控发射机
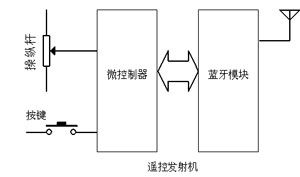
无线遥控系统中发射机的组成框图如图1所示。
蓝牙|0">蓝牙技术提供低成本,短距离的无线通信。支持点对点,一点对多点的双向数字传输。工作在2.402~2.480GHz的ISM频段。数据速率 1Mb/s,纠错编码采用1/3率的重复码,2/3率的汉明码,跳频频率数79个频点,跳频速率1600次/秒,发射距离 Class2级的模块为10m左右,Class 1 级的模块可达100m。
将蓝牙模块用于无线电遥控系统,把无线射频部分的工作交由蓝牙模块完成。使遥控系统设计变得简单方便。
无线遥控发射机
无线遥控系统中发射机的组成框图如图1所示。
|
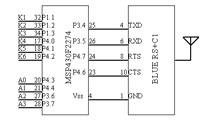
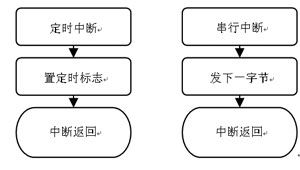
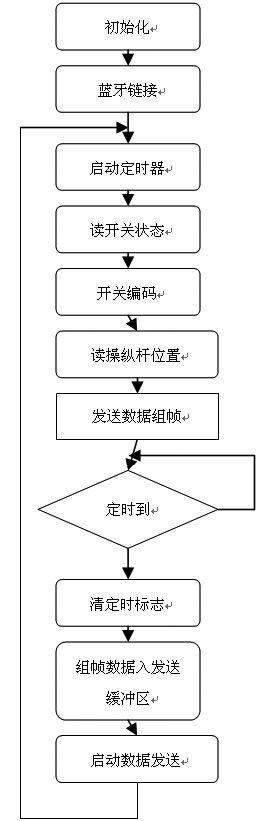
图1 发射机的组成框图 它有三路模拟量(操纵杆)输入、六路开关量(按键)输入。微控制器选用TI公司的MSP430F2274单片机,主要优点是低功耗。蓝牙模块使用的是Stollmann公司BlueRS+ Class1模块。 发射指令编码:六个开关量全部状态的组合有64组码。由于实际有效编码的组数远小于全部状态组合码数。并且用2字节(16bit)的长度表示开关状态有效组合编码,故采用加大码组间汉明距离,使用具有纠错功能的分组码作为开关状态的传输编码。 发射机指令编码每20ms发送一帧。每帧数据的格式如图2所示。
|


- 罗姆“传感器战略”:全力完善软件解决方案(10-29)
- 做一个数字黄蜂大脑放到无人机中,你猜会发生什么?(04-20)
- MCU+智能传感,无缝物联网全靠它俩了!(05-15)
- 用TSSP4P38接近传感器,创造“奇妙”猫咪门铃(02-01)
- STM32中采用DMA实现方波的产生和捕获(10-07)
- 利用精密电池检测和传感技术降低汽车电气故障(08-03)