基于倾角传感器设计的帆船姿态仪
时间:06-15
来源:中电网
点击:
随着2008年北京奥运会的临近,帆船运动越来越受到人们的重视,如何利用现代科技手段辅助训练,来提高比赛成绩显得尤为重要。从赛场实时采集数据指导训练和减轻帆船教练工作强度方面考虑,设计帆船姿态仪,可使教练员了解每位运动员具体的训练细节,提高工作效率。
1 帆船姿态仪的系统设计
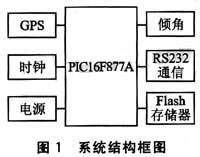
基于PIC16F877A设计的帆船姿态仪,能采集帆船行驶过程中的前后仰俯角、左右摇摆角、桅杆旋转角和GPS系统记录帆船行驶轨迹。系统每0.5s将采集到的数据记录1次,记录时间大约为5 h(小时)。上位机通过RS232接口,可将存储的数据读取上来。上位机可以形象地将帆船行驶轨迹、帆船前后仰俯角、左右摇摆角等数据显示出来。它的系统结构框图如图1所示。
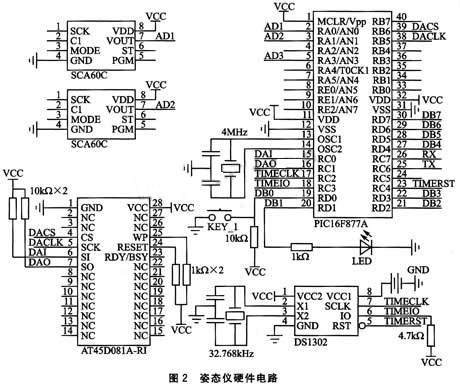
PIC16F877A单片机作为处理器,通过采集倾角传感器SCA60C检测帆船的倾斜角度,然后将检测到的数据存储到AT45D081A-RI大容量Flash存储器中。其部分硬件电路如图2所示。
DS1302时钟芯片记录测控系统中的数据,并在记录时进行时间标定。其软硬件设计简单,时间记录准确,既避免了连续记录的大工作量,又避免了定时记录的盲目性。DS1302与CPU的连接仅需要3条线,即SCLK、I/O、RST。DS1302与单片机连接的电路原理如图2所示。
AT45D081A-RI是Atmel公司生产的大容量Flash存储器,容量为4 Mb。它采用串行方式传送数据,单5V电源供电;具有功耗低、体积小、容量大、传送快,与CMOS和TTL电平兼容以及掉电后数据不丢失等特点,因此,其硬件设计与软件编程都很容易。
系统通过RS232C通信方式与上位机通信,将帆船在海中行进的姿态传送到上位机,最后由上位机软件管理和显示。
3 倾角传感器的选取
系统采用上海朗尚科贸有限公司的SCA60C高精度倾角传感器检测帆船的倾斜角度,通过不同的安装方式检测帆船前后仰俯角和左右摇摆角。SCA60C实际上是一个加速度计,内部由一个硅微传感器和信号处理芯片组成;SMD形式封装;通过测量地球引力在测量方向上的分量,再将其转换为倾斜角度,其模拟输出特性如图3所示。箭头标明了加速度的正方向,如果帆船沿箭头所指方向有加速度,或按图3所示的方向倾斜,则输出值增大。
4 上位机软件设计
采用Delphi软件设计帆船姿态仪的上位机,将帆船姿态仪采集存储的数据通过串口读取上来,利用上位机软件对读取上来的数据进行管理,并以曲线的形式形象地显示出来,教练员可以在上位机上了解运动员训练的具体情况。软件界面如图4所示。
1 帆船姿态仪的系统设计
基于PIC16F877A设计的帆船姿态仪,能采集帆船行驶过程中的前后仰俯角、左右摇摆角、桅杆旋转角和GPS系统记录帆船行驶轨迹。系统每0.5s将采集到的数据记录1次,记录时间大约为5 h(小时)。上位机通过RS232接口,可将存储的数据读取上来。上位机可以形象地将帆船行驶轨迹、帆船前后仰俯角、左右摇摆角等数据显示出来。它的系统结构框图如图1所示。
PIC16F877A单片机作为处理器,通过采集倾角传感器SCA60C检测帆船的倾斜角度,然后将检测到的数据存储到AT45D081A-RI大容量Flash存储器中。其部分硬件电路如图2所示。
DS1302时钟芯片记录测控系统中的数据,并在记录时进行时间标定。其软硬件设计简单,时间记录准确,既避免了连续记录的大工作量,又避免了定时记录的盲目性。DS1302与CPU的连接仅需要3条线,即SCLK、I/O、RST。DS1302与单片机连接的电路原理如图2所示。
AT45D081A-RI是Atmel公司生产的大容量Flash存储器,容量为4 Mb。它采用串行方式传送数据,单5V电源供电;具有功耗低、体积小、容量大、传送快,与CMOS和TTL电平兼容以及掉电后数据不丢失等特点,因此,其硬件设计与软件编程都很容易。
系统通过RS232C通信方式与上位机通信,将帆船在海中行进的姿态传送到上位机,最后由上位机软件管理和显示。
3 倾角传感器的选取
系统采用上海朗尚科贸有限公司的SCA60C高精度倾角传感器检测帆船的倾斜角度,通过不同的安装方式检测帆船前后仰俯角和左右摇摆角。SCA60C实际上是一个加速度计,内部由一个硅微传感器和信号处理芯片组成;SMD形式封装;通过测量地球引力在测量方向上的分量,再将其转换为倾斜角度,其模拟输出特性如图3所示。箭头标明了加速度的正方向,如果帆船沿箭头所指方向有加速度,或按图3所示的方向倾斜,则输出值增大。

4 上位机软件设计
采用Delphi软件设计帆船姿态仪的上位机,将帆船姿态仪采集存储的数据通过串口读取上来,利用上位机软件对读取上来的数据进行管理,并以曲线的形式形象地显示出来,教练员可以在上位机上了解运动员训练的具体情况。软件界面如图4所示。
结 语
帆船姿态仪安装调试简单,技术先进,功能丰富,维护方便,可帮助帆船运动员进行科学的训练,迎接2008年北京奥运会。
- 无人机发展离不开传感器,除了惯性丈量单元还有啥?(07-01)
- 电解质型倾角传感器在天线控制中的应用(06-20)
- 汽车四轮定位中倾角传感器的应用(11-24)
- SCA100t 和MCU在数字倾角传感器中的应用(11-11)
- 物联网兴起 传感器将进入高速增长期(11-26)
- iC-MHL200:12 位通用型磁定位编码器 iC(01-13)