基于IDP卫星通信模块的远洋船舶实时监控系统
针对远洋中无GPRS信号不能进行无线通信的问题,设计了以STM32F103VCT6单片机与IDP卫星通信模块为平台的远洋船舶实时监控系统。本系统具有高精准度、实时性强、全天候监控等特点。给出了系统的工作原理、硬件设计与软件实现方法,详细分析了中央控制模块、GPS定位信息采集模块、无线通信模块。实验结果验证了采用STM32F103VCT6单片机与IDP卫星通信模块设计远洋船舶监控系统的可行性。通过该系统,可实时监控远洋船舶的地理位置信息以及其他信息,最大限度地确保远洋船舶航运中的安全。
引言
本文采用ARM芯片作为控制核心,设计了一款以GPS定位模块与卫星通信模块为依托的远洋船舶实时监控系统。该系统能够按照用户要求定时上传远洋船舶的位置信息以及航向信息,解决了传统船舶定位和救援中出现的问题,保证了船舶动态监测及时、准确、可靠。同时该系统方便扩展其他功能,以便获得更广泛的应用。
1系统整体设计
搭载在船舶上的专用电路板实时采集船舶的位置、速度、航向、SOS报警等信息。专用电路板将采集到的数据处理后,经卫星通信模块发送至海事通信卫星,通过海事卫星将数据传输到地面接收站供给用户使用。系统整体框图如图1所示。

图1 系统整体框图
2系统硬件设计
2.1硬件总体设计
硬件系统采取模块化设计,主要分为中央处理模块、GPS定位模块以及卫星通信模块等,硬件结构如图2所示。数据的加工处理及输入/输出控制由ST公司的STM32F103VCT6处理器完成。处理器接收到GPS数据后对数据处理并定时上传加工后的定位数据至地面接收站。GPS定位模块采用Globalsat公司的ET-314,通过该模块实时更新GPS定位数据。卫星通信模块采用加拿大Skywave公司的IDP卫星通信模块,该模块通过国际海事卫星(Inmarsat)来实现与地面接收站之间的全天候、广区域、高可靠性的双向通信。为了备份长时间的定位数据,采用了SST公司的SST25VF016B芯片作为外部Flash来实现数据存储的功能。

图2 硬件结构图
2.2中央控制模块
本系统采用STM32F103VCT6处理器作为主控制芯片。STM32F103VCT6是32位的具备Cortex-M3内核的处理器,最高工作频率可达72 MHz.
中央控制模块STM32F103VCT6作为本系统设计的核心部分,负责数据地采集、分析、加工以及安排数据上传工作。GPS原始数据会实时传递至MCU的串口缓冲区。MCU验证处理后,通过串口发送至卫星通信模块。SOS报警信息通过设定的GPIO口发送至MCU,通过卫星通信模块上传至地面接收站。本模块硬件原理图略--编者注。
2.3 GPS定位模块
定位模块采用Globalsat公司的Globalsat ET-314芯片,来实现船舶的位置定位与速度采集。Globalsat ET-314模块使用了SIRF III芯片,具备快速定位、定位精度高、启动时间短以及探测范围广的优点。使用Globalsat ET-314模块实现功能如下:
①精确地采集到地理位置信息。Globalsat ET-314模块定位的精确度为10 m.
②精确地采集时间信息。Globalsat ET-314模块采集到的时间与GPS时间保持1μs的同步关系。

图3 GPS定位示意图
GPS定位的基本方法为空间距离后方交会,此方法需要知道卫星瞬间位置。如图3所示,假设t时刻在地面上的待测地点放置GPS信号接收机,测定出GPS信号到达此处接收机的时间为△t,根据其他已知条件确定以下4个方程式。其中已知卫星1,卫星2、卫星3、卫星4以及地面接收站的地理坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4)、(x,y,z);d1,d2,d3,d4为测量伪距;c为光速;
dt为卫星时钟偏差;dT1,dT2,dT3,dT4为GPS的接收时钟偏差项。
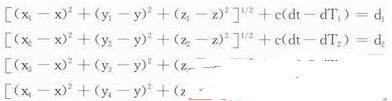
通过联立这4个方程式,可以得到接收机的地理坐标。GPS定位模块的原理图如图4所示,GPS通过串口与MCU获得通信。

图4 GPS模块电路原理图
2.4卫星通信模块
卫星通信模块选用的是加拿大Skywave公司的卫星通信模块IDP.IDP的通信基于国际海事卫星,通信全球覆盖不受外界因素限制。IDP还具备传输数据能力强的优点,其单次发送数据可达6 400字节,单次接收的数据量可达10 000字节。IDP支持二次开发,方便用户将IDP接入其他产品中使用。
国际海事卫星通信系统是世界上第一个全球性的移动业务卫星通信系统。Inmarsat通信系统基本是由四部分组成,即空间段、网络协调站(Network Coordination Station)、卫星地面站(Land Earth Station)和卫星船站(Mobile Earth Station)。IDP680即为卫星船站。发送信息经卫星地面站处理后经专用网关转发至用户服务器供用户分析使用。终端发起通信流程如图5所示。

图5 终端发起通信图
IDP680为用户提供了4个可配置I/O口以及1路RS232、1路RS458串口方便用户集成使用。其接口定义图略--编者注。
配置卫星通信模块使用中断方式接收MCU通过串口传输过来的数据。校验正确后,卫星通信模块执行发送数据功能。用户发送的远程指令,卫星通信模块接收后通过串口传输至MCU,MCU使用中断方式处理串口传输过来的数据。校验正确后,执行相应的命令动作。
2.5数据存储模块
数据存储采用了1片1 M x 16位的SST25VF016B芯片。上传的定位数据包为27个字节,总共可以存储(2x 1 024×1 024)/27=77 672条定位数据。按照每分钟存储一条定位数据的频率,共计可以存储77 672/(60×24)=53天的定位数据。
在线监控 卫星通信 IDP GPS STM32F103VCT6 相关文章:
- 移动卫星通信 (01-02)
- 下一代卫星移动通信(上) (01-25)
- 卫星互联网技术(03-17)
- 无线接入技术应用简析(06-12)
- 是福音还是侵犯隐私?先进定位技术可精确判断位置(09-12)
- 基于位置的服务在3G系统中的应用(上)(09-30)