感应无线位置检测系统设计与实现
输线,则有:
(1)线圈1处于位置①
若G2 G1 G0=010,即g=3,则APD=2×r=30cm。
若测得传输对线G0、的幅度为:A(G0)=0.38Amax,A()=0.62Amax,
则由式(7)~(10)得:P0=0.38,P1=0.62,HRPD=P0×r=3.8cm;ADD=APD+HRPD=33.8cm。
(2)线圈1处于位置②
若G2 G1 G0=011,即g=4,则APD=g×r=40cm。
若测得传输对线G0、的幅度为:A(G0)=A()=0.5Amax,
同理可得:P0=P1=0.5,HRPD=P1×r=0.5×10cm=5cm;ADD=APD+HRPD=45cm。
(3)线圈1处于位置③
A(G0)=Amax,A()=0,可得P0=1,P1=0。由于A(G0)=0,G1感应信号与基准信号比较,相位相同(即为0)或相反(即为1)。所以,G2 G1 G0=111或G2 G1G0=101,即g=5或6。则有:
1)取g=5,则APD=g×r=5×10cm=50cm,HRPD=P0×r=1×10cm=10cm,ADD=APD+HRPD=50cm+10cm=60cm。
2)取g=6,则APD=g×r=6×10cm=60cm,HRPD=P1×r=0×10cm=0cm,ADD=APD+HRPD=60cm+0cm=60cm。
综上1)、2),均得:ADD=60cm。
3 感应无线位置检测电路
感应无线位置检测系统电路框图如图5所示。当中控室地面局开始发送载波信号时,DCD=1;CPU检测到DCD后,对2PSK解调输出检测,将第1个1作为起始位进行串行数据接收,得到APD位置数据g;在检测G0的时间段,启动A/D1和A/D2,从A/D1和A/D2读出接收线圈0接收的信号幅度A(AN0)和接收线圈1接收的信号幅度A(AN1),将各数据代入公式(5)~(8),可得移动机车位置ADD。
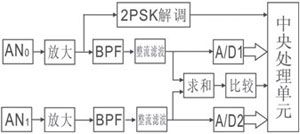
图5 感应无线位置检测电路框图
4 感应无线位置检测实验
实验方法:在编码电缆任找一处反复移动天线箱,直至检测到A()为最小,此时显示地址为29.000m,以此处作为实际的29.000m。然后将天线箱在此附近每隔2mm移动一次,记录每次所检测的A(G0)和A(),并根据检测的数据计算出位置数据:HRPD、ADD。同理,在30.000m处作同样测试。部分检测数据和计算结果如表1所示。
表1 位置检测部分实测数据和计算结果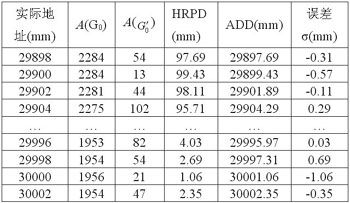
实验结果说明:a.实测位置与理论上对应位置偏差较小;b.位置检测精度高,分辨率为2mm。为了减小误差,实际应用中将多次实验的数据制成表格,计算出HRPD,并进行修正。
5 结论
本文设计的感应无线位置检测系统,是利用编码电缆中传输对线和天线箱线圈的电磁感应来实现移动机车位置检测的,采用的是非接触式的绝对位置检测方式,克服了传统有线和无线位置检测的缺陷,可满足移动机车精确定位的要求。目前,感应无线位置检测技术已被应用到焦炉工业移动机车位置检测中,用于对推焦车、熄焦车、装煤车和除尘车的自动控制,实际应用效果良好,基本实现了自动化。
- RF WCDMA 基准比较测试白皮书(05-25)
- 3G MIMO技术的实现挑战与解决方案(06-02)
- 基于简化HDLC规程的通信卡及驱动程序设计(02-12)
- 3GPP LTE的预编码和空间多路复用MIMO技术(09-23)
- 超高频RFID读写器射频前端设计与仿真(03-24)
- CPLD的DSP多SPI端口通信设计(03-24)