智能机器人控制系统的设计与实现
时间:07-09
来源:控制工程网
点击:
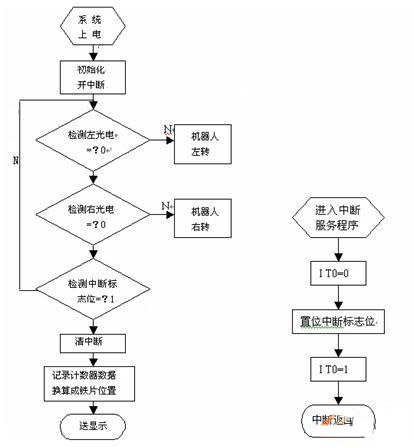
图5 系统软件流程图 4 系统软件流程
系统软件流程如图5所示。
5 结 论
本文基于单片机及传感器原理,以单片机为控制器的核心,小型直流电机作为驱动元件,配置不同类型的传感器,通过软件编程,制作出了一个价格低廉、模块化结构的小型机器人。大量的行走实验证明,该机器人能够顺利路径跟踪和自动纠偏自主行走,并完成探测、显示等功能。
本文作者创新点:本文针对具有引导线环境下的路径跟踪这一热点问题,采用多传感器信息融合技术,通过单片机控制,实现了机器人的路径跟踪和自动纠偏的功能,方法简单,易于实现,造价低廉,效果较好。
- 基于计算机视觉的移动机器人导航(11-14)
- 基于双计算机的仿人机器人的视觉跟踪系统(05-06)
- 空间机器人中央计算机的双机热备份(08-15)
- 无线技术在工业以太网上的发展应用(01-16)
- 基于WiFi的远程视频传输智能机器人设计(03-26)
- 智能化网络家电控制中电力载波模块的设计(03-23)