在MCU系统中如何利用ADC技术进行数据采集
益,根据ADC型号不同可能有0.5或1倍的增益,这样通过调整输入信号可更好的兼容选择VREF。
ADC转换循环
ADC的时钟系统要易于配置,以便支持MCU应用的多种用途。SAR ADC属于奈奎斯特率转换器,系统设计人员要仔细选择以满足采样率至少两倍于输入信号带宽的奈奎斯特准则。当配置ADC时,开发人员还必须考虑两个计时任务。这两个任务涉及ADC转换循环和MCU系统内的可用时钟源。转换循环有两部分组成:一个是跟踪周期,一个是转换周期,如图1所示。
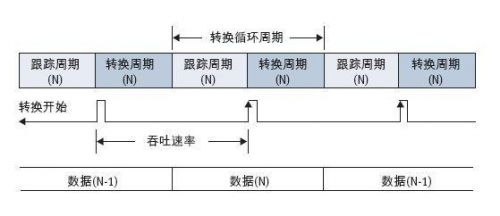
图1:ADC转换循环。
跟踪周期是转换循环中当ADC输入电路连接到输入信号时所花费的那部分时间。输入采样发生在跟踪周期结束并且输入电路从输入源断开时。这一刻是由连接到ADC的数字控制信号引起的,称为转换启动(CNVST)。该命名恰如其分,CNVST标志着跟踪周期的结束和转换周期的开始。
转换周期是ADC执行逐次逼近寄存器(SAR)逻辑时的那部分ADC转换循环。ADC用于跟踪输入信号的时间量与ADC的输入负载特性、信号源的驱动能力和测量所需的精度要求相关。MCU器件规格手册列出ADC输入模型,给出ADC输入的输入电容、电阻和漏电流值。为了精确测量,开发人员应当为输入信号稳定保留足够的跟踪时间,最好超过0.5 LSB。
虽然转换周期通常是一个与SAR ADC时钟周期有关的可配置时间量,即对于每一位的判别时间,但他最好是采用CNVST请求之间的时间量描述跟踪时间,而不是SAR转换周期。简单的说,如果ADC没有处于转换状态,那他就处于跟踪状态。转换请求之间的过长时间会导致更多的跟踪时间。为了解决这个问题,Silicon Labs MCU系列产品提供在转换请求之间关闭跟踪电路的功能,从而可降低系统功耗。
ADC转换吞吐速率是转换请求的频率,通常命名为符号Fs。最大吞吐速率的设定通常由ADC的最小跟踪时间以及最小转换时间限定。恒定的吞吐速率是通过发送同样时间间隔的转换请求流来实现的。对于管理两个关键的计时任务来说,可配置的ADC时钟系统是必不可少的。
计时任务之一是生成用于转换周期期间的时钟,用于执行SAR算法。与转换周期相关的SAR时钟(SARCLK)通常来自MCU系统时钟。SARCLK的可配性需要适应MCU系统时钟,时钟频率范围从不到1MHz到超过100MHz。由于ADC内部的比较器设计,将产生SAR转换逻辑被定时的最大速率。系统设计人员必须小心配置SARCLK频率,避免超过其最大时钟速率规格。另一个计时任务是生成转换请求采样速率,其不能超过给定适当转换周期配置的ADC转换器的最大吞吐速率。
孔径抖动和延迟
转换启动请求信号可以看作是采样时钟,因此它决定ADC采样和保持电路实际捕获输入信号的时间点。当配置ADC转换请求时基时,需要考虑与采样和保持电路相关的规格,即孔径抖动和孔径延迟。这两个规格影响输入信号采样的精确度,因为输入信号相对于孔径时间延迟在不断快速变化,如图2所示。
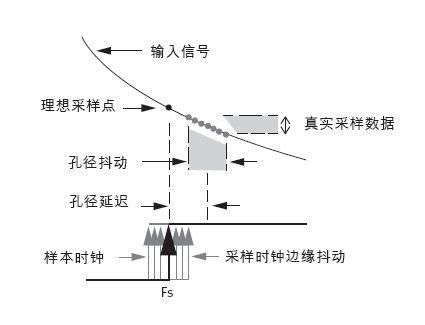
图2:孔径抖动和延迟。
孔径抖动在生成转换启动信号的时钟系统和其他电路中将导致误差(即时钟抖动),同时孔径延迟导致转换启动信号和采样开关之间电路延迟。孔径抖动在数据采集系统中会引入噪声和失真。孔径延迟可以由MCU设计人员内部管理,使其最小化,以避免由于长延迟而增加更多抖动的风险。孔径延迟在数据采集系统中引起延迟误差。太长的孔径延迟类似于水池在"水池满"信号发出之前就开始溢出。
由于上述原因,需要精确的时基用于产生稳定的转换启动请求时序。MCU提供一系列板上时钟或外部时钟源作为系统时钟选择。系统设计人员必须仔细选择具有足够精度的时钟源,以满足其数据采集系统的需求。对于高速输入源,需要非常精确的晶体振荡器。另一方面,直流(DC)或慢速输入可以更好地容忍时钟系统错误,但仍然需要在转换之间保留足够的稳定时间。
突发模式特性
两个特别有用的特性是突发模式和标记跟踪模式。突发模式根据可编程的连续ADC转换数量生成累积的或平均结果,所有触发来自一个转换请求。标记跟踪模式通过改变转换启动请求操作来分担MCU系统所需的跟踪时间管理。通常,转换启动标记在跟踪周期终点和转换周期起点。但在标记跟踪模式中,转换启动请求却在跟踪周期起点触发,然后持续一段时间,此时长为基于预配置的SARADC时钟周期的可编程时长,最后才开始转换。带有标记跟踪的触发模式可为低频运行的MCU在单MCU时钟循环中获得累积的ADC结果,因此减少系统循环数和降低功耗,如图3所示。
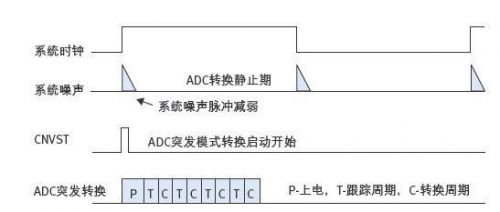
图3:ADC突发模式,在单个系统时钟循环下实现4个数据累加。
ADC数据窗口
8位和32位混合
- 巧用MCU内部振荡器,为电源增加智能控制(02-01)
- 电源转换应用中数字反馈回路的益处(11-14)
- ADS8323与高速FIFO接口电路的CPLD实现(03-26)
- 基于FPGA的多通道数据采集系统设计(09-30)
- 电池管理应用中精确测量和温度稳定的重要性(01-12)
- 基于MCU和基于ASIC的LED可控硅调光方案对比与解析(01-05)