并联运行逆变器的均流技术详解
1引言
单个电源组件的容量是有限的,为了增加电源的容量,提高供电可靠性,常采用电源并联技术。例如50台电源并联供电,即使其中有几台出现故障,由于供电系统具有一定的冗余度,不会影响整个系统的正常工作。对于实现大容量的逆变电源,同样也可以采用并联技术。由于逆变电源通常采用新型全控功率开关器件构成单元模块,受功率开关器件容量的限制,单个逆变电源模块的容量是十分有限的,通过多个模块并联进行扩容,不仅可以充分利用新型全控功率开关器件的优势,减少系统的体积,降低噪声,还可以提高系统的动态响应速度和逆变电源变换器的通用性。
然而,交流电源间的并联运行远比直流电源并联运行复杂,它不但要求两电源输出电压幅值相等,而且要求其频率与相位严格一致。为了使各并联模块可靠地工作,最重要的是解决均流问题。本文分析了环流的产生,介绍了解决均流问题的几种方法。
2并联运行分析
两台逆变电源并联连接的电路如图1所示。假设输出波形是标准的正弦波,不考虑畸变的影响。图中RL为负载电阻,R1、R2为线路阻抗,分别代表逆变器1和逆变器2稳态下的输出电压和电流矢量,则表示其有效值。实际电路中,由于有RωL,因此可忽略电路电感的影响,R1、R2设为纯电阻,则有:=[1-2R1/(2R1+RL//2R2)]+[1-2R2/(2R2+RL//2R1)](1)=(-)/2R1=[/(2R1+RL//2R2)]-[-/2R2+RL//2R1]×[RL/(2R1+RL)](2)=+(3)=(-)/2(4)式中:为流经两个逆变电源的环流。
设R1=R2=R且因R<IMGSRC="IMAGE/08080148.JPG"HEIGHT=12WIDTH=10>=[1-2R/(2R+RL//2R)]×(+)=(+)/2(5)=(-)/2R=(-)/2×2R=(-)/4R=Δ/4R(6)图2为逆变器并联时的电压矢量关系,由式(5)和式(6)可知:当两个逆变器的输出矢量、的相位或幅值不同时,即使是很小的电压差,但因线路阻抗R值非常小,也会产生远大于额定值的环流。由于环流不经过负载而在两台电源之间流通,对逆变器的功率器件和输出变压器均不利,因此必须加以限制。
图1两台逆变电源并联运行示意图
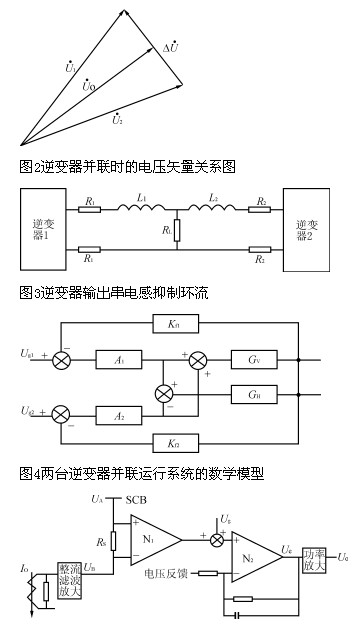
图5反馈控制方式实现均流的原理图
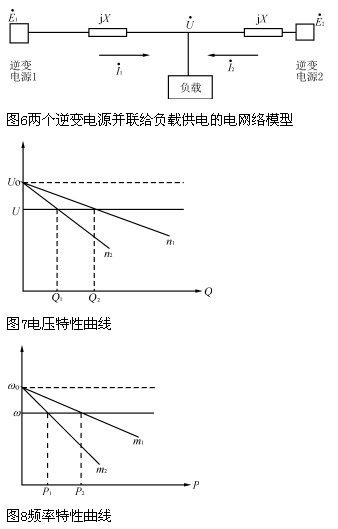
3均流方案由于逆变电源输出是交流量,即使、在稳态下输出的幅值、频率及相位均相等,但因各逆变器电路参数及外界扰动的差异,其动态调节过程不可能完全一致,所以瞬时的电压差不可避免。为限制产生过大的环流,可在逆变器的输出端串入限流电抗,如图3所示,设L1=L2=L,R1=R2=R,则有:=[RL/(2R+2RL+jωL)](+)=GV(+)(7)=(1/jωL+2R)[(-)/2]=GH(-)(8)
限流电抗的加入使环流降低,有利于并联运行,但也降低了系统的稳定精度。因此,限流电抗不宜过大,一般取RLωLR,其中ω为角频率。
为使各逆变器并联时负载电流均匀分配,可将逆变器的输出电流与平均负载电流的偏差值(即环流值)作为反馈引入控制系统,图4是两台逆变器并联运行系统的数学模型,其中A1、A2为系统的闭环传递函数,Kf1、Kf2为均流反馈系数,GH为环流产生环节传递函数,GV为输出电压传递函数。则有:=GV(A1Ug1+A2Ug2)(9)=GH(A1Ug1-A2Ug2)(10)
加入均流电路时′(11)′=GV(A1Ug1′-A2Ug2′)
=GV[(A1(Ug1-Kf1IH)-A2(Ug2-Kf2IH)](12)
设两台逆变电源的A1=A2=A,Kf1=Kf2=Kf,则上两式变为:′(13)′=GV(A1Ug1-A2Ug2)=Uo(14)
式(13)表明,选择适当的均流反馈系数Kf可使2A·Kf·GH1,使IH′IH。可见加入均流环节后使IH大大减小,输出电流I1、I2趋于一致。式(14)表明,加入均流电路后的输出值未变化,仍然跟踪给定电压。
图5是上述反馈控制方式的原理图,逆变电源的输出电流由互感器检测,经整流滤波放大后得到直流电压UB,它反映了该电源的输出电流的大小。各电源的UB信号通过电阻RS连到公共均流母线。母线上的电压UA反映了所有电源UB的平均值。当某一逆变电源的输出电流大于平均负载电流时,UB>UA时,该电源的控制放大器N1使其给定电压Ug减小,迫使该电源的输出电压降低;反之,使其输出电压升高。这样,通过比较输出电流与平均负载电流的偏差值来调节输出电压,从而达到均流的目的。
在并联的逆变电源系统中,如果逆变单元的频率,幅值完全相同,但存在一定的相位差,则逆变单元之间会出现较大的环流,主要为有功环流。此时部分逆变电源将工作在整流状态;如果频率和相位一致,幅值有差异,也会出现环流,不过此时部分逆变单元吸收无功功率,另一部分逆变单元输出无功功率。此外,即使输出同相位,同频率,同幅值的正弦波,但因谐波含量有较大的差异,仍存在谐波环流。下面分析在这些不同情况下的均流控制方法。
(1)有功和无功并联控制该控制方式实际上是实现并联功率偏差控制。当并联逆变电源单元出现输出有功或输出无功不一致时,逆变电源将检测出本单元模块的有功或无功偏差值,来调节逆变器单元输出电压的相位和幅值,保证每一个逆变单元输出的有功无功相等,达到均流的目的,图6是两个逆变电源并联给负载供电的电网络模型,设逆变单元1输出的视在功率为:
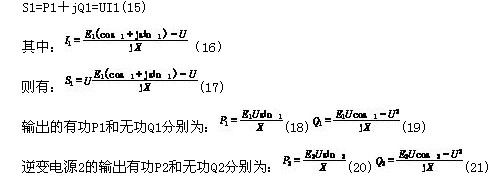
由式(18)—式(21)可知,有功的大小主要取决于功率角δ,无功的大小主要取决于逆变电源的输出幅值E1和E2,因此可以通过调节功率角来调节输出有功功率的大小,通过调节逆变电源单元输出电压的幅值来调节无功的大小,从而可实现各输出电源模块的均流。
(2)电压频率下垂控制该控制方式主要依靠调节开关频率的外部特性倾斜度,达到并联的逆变电源均流控制的目的,这种方式在直流电源并联均流控制中采用,可以自动实现并联输出均流。在逆变电源的并联运行时,同样可以通过电压频率下垂均流控制来达到并联逆变电源输出有功和无功自动均分的目的,从而抑制并联环流。基于预先的下垂特性,可得到下式:
ω=ω0-mp(22)
U=U0-nq(23)
式中:ω0为空载频率;
U0为空载电压幅值;
m为频率下垂系数;
n为电压幅值下垂系数。
为了确保每个逆变电源能够根据其额定容量分担负载,下垂系数选择应满足:
m1S2=m2S2=…=mnSn(24)
n1S1=n2S2=…=nnSn(25)
式中:S1、S2、…、Sn为各并联逆变电源的额定容量。
下垂特性控制主要是将并联的各逆变电源单元模块的输出电压和频率调整到某一定值,使它们能够实现自动均流的目的,各并联单元之间是没有互连通信线的。下垂特性曲线如图7和图8所示。
(3)主从模块法主从模块控制方式是选择一个模块作为主模块运行,其它各并联模块受主模块控制,以实现各个模块均匀分配负载电流。图9是一个由电压控制的PWM逆变器(VCPI)功率单元和功率分配中心(PDC)单元组成的并联系统。其基本结构包括:
①一个VCPI主控单元其电压调节器保证系统输出幅值,频率稳定的正弦电压;
②N个电流控制的PWM逆变器(CCPI)从单元设计其具有电流跟随器性质,分别跟随PDC单元分配的电流;
③PDC单元专门负责检测负载电流,并平均分配给各CCPI单元,且是同步的。
VCPI单元通过锁相环(PLL)使正弦输出电压与市电或自身产生的基准电压信号同步,输出电流取决于负载性质。CCPI单元具有快速动态响应的特性,能迅速跟随负载电流指令变化,并能适应VCPI输出频率的变化。输出电压被看作干扰输入,通过前馈加以补偿。
PDC的主要功能是监控整个系统的工作状态,并按各单元的视在功率为各单元分配电流。该方案均流效果较好。
- MAX17502同步降压DC/DC转换器(05-06)
- 系统级电源管理对可携式产品的重要性(10-07)
- 开关频率的提高受限于哪些因素(08-13)
- 电源系统的电磁兼容性设计(01-20)
- 直流输出模块电源纹波和噪声测试(02-25)
- ADC输入采样结构选择要点(07-04)