直流电动机控制原理介绍
三相Y联结电路
三相半控电路结构简单,但电动机本体的利用率很低,每个绕组只通电1/3周期,没有得到充分的利用,而且在运行中转矩波动较大。在要求较高的场合,一般均采用如图10所示的三相全控电路。三相全控电路有两两换相和三三换相两种方式
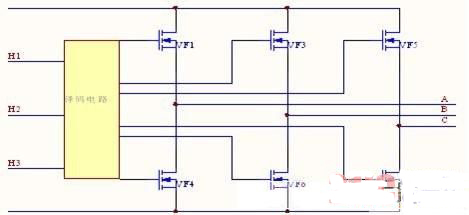
图10 三相全控电路
在该电路中,电动机的三相绕组为Y联结。如采用两两通电方式,当电流从功率管VF1和VF2导通时,电流从VF1流入A相绕组,再从C相绕组经VF2流回到电源。如果认定流入绕组的电流所产生的转矩为正,那么从绕组所产生的转矩为负,他们合成的转矩大小为 ,方向在Ta和-Tc角平分线上。当电动机转过60度后,由VF1VF2通电换成VF2VF3通电。这时,电流从VF3流入B相绕组,再从C相绕组流出经VF2回到电源,此时合成的转矩大小同样为 。但合成转矩T的方向转过了60度电角度。而后每次换相一个功率管,合成转矩矢量方向就随着转过60度电角度。所以,采用三相Y联结全控电路两两换相方式,合成转矩增加了 倍。每隔60度电角度换相一次,每个功率管通电120度,每个绕组通电240度,其中正向通电和反向通电各120度。其输出转矩波形如图11所示。从图中可以看出,三相全控室的转矩波动比三相半控时小,从0.87Tm到Tm 。
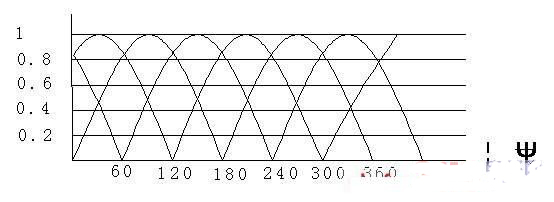
图11 全控桥输出波形图
三三通电方式,这种通电的顺序为VF1VF2VF3、VF2VF3VF4、VF3VF4VF5、VF4VF5VF6、VF5VF6VF1、VF6VF1VF2、VF1VF2VF3。当VF6VF1VF2导通时,电流从VF1管流入A相绕组,经B和C相绕组分别从VF6和VF2流出。经过60度电角度后,换相到VF1VF2VF3通电,这时电流分别从VF1和VF3流入,经A和B相绕组再流入C相绕组,经VF2流出。在这种通电方式里,每瞬间均有三个功率管通电。每隔60度换相一次,每次有一个功率管换相,每个功率管通电180度。合成转矩为1.5Ta.
三相Δ联结电路也可以分为两两通电和三三通电两种控制方式。
两两通电方式的通电顺序是VF1VF2、VF2VF3、VF3VF4、VF4VF5、VF5VF6、VF6VF1、VF1VF2,当VF1VF2导通时,电流从VF1流入,分别通过A相绕组和B、C两相绕组,再从VF2流出。这时绕组的联结是B、C两相绕组串联后再通A相绕组并联,如果假定流过A相绕组的电流为I,则流过B、C相绕组的电流分别为I/2。这里的合成转矩为A相转矩的1.5倍。
三三通电方式的顺序是VF1VF2VF3、VF2VF3VF4、VF3VF4VF5、VF4VF5VF6、VF5VF6VF1、VF6VF1VF2、VF1VF2VF3,当VF6VF1VF2通电时,电流从VF1管流入,同时经A和B相绕组,再分别从VF6和VF2管流出,C相绕组则没有电流通过,这时相当于A、B两相绕组并联。这时相当于A、B两绕组并联,合成转矩为A相转矩的倍。
图12示出采用8751单片机来控制直流无刷电动机的原理框图。8751的P1口同7406反相器联结控制直流无刷电动机的换相,P2口用于测量来自于位置传感器的信号H1、H2、H3,P0口外接一个数模转换器。
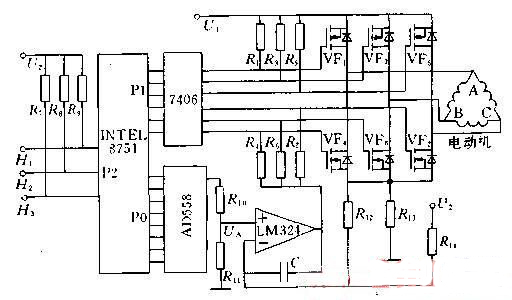
图12 直流无刷电动机计算机控制原理图
换相的控制
根据定子绕组的换相方式,首先找出三个转子磁钢位置传感器信号H1、H2、H3的状态,与6只功率管之间的关系,以表格形式放在单片机的EEPROM中。8751根据来自H1、H2、H3的状态,可以找到相对应的导通的功率管,并通过P1口送出,即可实现直流无刷电动机的换相。
起动电流的限制
主回路中串入电阻R13,因此Uf=R13*IM,其大小正比于电动机的电流IM。而Uf和数模转换器的输出电压U0分别送到LM324运算放大器的两个输入端,一但反馈电压大于Uf大于来自数模转换的给定信号U0,则LM324输出低电平,使主回路中3只功率管VF4、VF6、VF2不能导通,从而截断直流无刷电动机定子绕组的所有电流通路,迫使电动机电流下降,一旦电流下降到使Uf小于U0,则LM324输出回到高电平。主回路又具备导通能力,起到了限制电流的作用。
转速的控制
在直流无刷电动机正常运行的过程中,只要通过控制数模转换器的输出电压U0,就可控制直流无刷电动机的电流,进而控制电动机的电流。即8751单片机通过传感器信号的周期,计算出电动机的转速,并把它同给定转速比较,如高于给定转速,则减小P2口的输出数值,降低电动机电流,达到降低其转速的目的。反之,则增大P2口的输出数值,进而增大电动机的转速。
PWM控制的实现
转速控制也可以通过PWM方式来实现。图13和图14为PWM控制实现直流无刷电动机转速的控制。
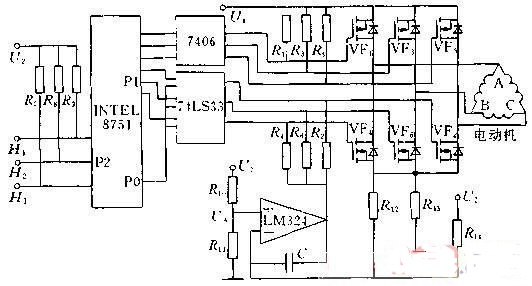
图13 PWM控制原理图
直流无刷电动机的正转反转,通过改变换相次序来改变其转动方向。具体做法只需要更换一下换相控制表。
变结构控制的实现
当直流无刷电动机处于起动状态或在调整过程中,采用直流无刷电动机的运行模式,以实现动态相应的快速性,一旦电动机的转速到了给定值附近,马上把它转入同步电动机运行模式,以保证其稳速精度。这时计算机只需要按一定频率控制电动机的换相,与此同时,计算机在通过位置传感器的信号周期,来测量其转速大小,并判断它是否跌出同步。一旦失布,则马上转到直流无刷电动机运行,并重新将其拉入同步。
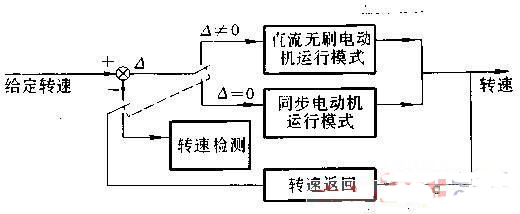
图15 直流无刷电动机的变结构控制
- 直流无刷电动机原理及设计(12-06)
- PWM控制电路的基本构成及工作原理(02-23)
- 基于PWM控制的开关电源系统仿真研究(10-21)
- 电流模式PWM控制器满足绿色电源设计需求(08-24)
- 恒流LED驱动系统的设计方案(01-17)
- 一种H型双极模式PWM控制的功率转换电路设计(11-24)