lem电流传感器在伺服控制系统中的应用
引言
伺服技术是跟踪与定位控制技术,是机电一体化技术的重要组成部分,它广泛地应用于数控机床、工业机器人等自动化装备中。随着现代工业生产规模的不断扩大,各个行业对电伺服系统的需求日益增大,并对其性能提出了更高的要求。因此研究、制造高性能、高可靠性的伺服驱动系统是工业先进国家竞相努力的目标,有着十分重要的现实意义。
目前数字伺服驱动器基本被日本、欧美等国家垄断。我国每年需要从国外进口大量的此类设备用于cnc数控机床等行业,进口驱动器价格高,维修服务不便。我国具有自主知识产权的全数字式伺服驱动器约于上个世纪90年代开始规模化生产制造。华中数控hsv系列全数字交流伺服电机驱动单元具有良好的性能。我公司自主开发的全数字交流伺服系统调速比为1:5000。高端产品往往要采用国外的交流伺服系统,主要是国产伺服驱动控制器在高速和高精等控制特性方面,与日本的fanuc、三菱、松下、富士以及德国的西门子等国外先进产品相比,还存在着显著差距。
伺服控制系统硬件设计方案
数字伺服系统主要由五部分组成:永磁同步电动机、电源模块、驱动与逆变电路模块、速度与位置检测电路模块以及控制电路模块。控制电路模块包括核心控制芯片,人机界面和通讯模块四大部分;驱动与逆变电路模块包括逆变器主电路,电压/电流采样电路,过压/欠压保护、上电限流保护与制动电路等,数字伺服控制系统硬件框图如图1所示。
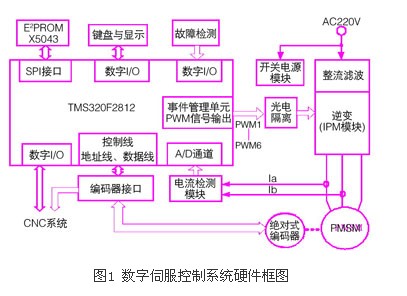
tms320f2812dsp为控制核心,接收来自cnc、编码器接口、电流检测模块和故障信号处理模块的信息,完成对永磁同步电机控制和故障处理。光电隔离模块作为电子电路与功率主电路的接口,将dsp发出的svpwm信号经送入ipm模块,完成dc/ac逆变,驱动电动机旋转。编码器接口将绝对式编码器所记录的永磁同步电动机的磁极位置、电动机转向和编码器报警等信息送往dsp,同时将永磁同步电动机的位置信息送往cnc。电机相电流经电流检测模块量测、滤波、幅度变换、零位偏移、限幅,转化为0~3v的电压信号送入dsp的a/d引脚。功率主电路的过压、欠压、短路、电源掉电和ipm故障等信号经故障检测模块检测与处理后,送入dsp的i/o端口。键盘与显示模块是控制器的人机接口,用以完成控制参数的输入,运行状态与运行参数显示。存储器模块用以存储控制参数与系统故障信息。
伺服的核心控制芯片采用ti公司最新的电机专用控制芯片tms320f2812。与其它同类dsp相比它有以下突出性能:
采用高性能的静态cmos技术,主频可以达到150mips,使得指令周期缩短到6.67ns(150mhz),并采用32位操作,从而大大提高处理能力;
低功耗,供电电压降为1.8v(内核)和3.3v(i/o);
片内高达128k字的flash程序存储器,18k的saram和4k的rom;
具有12位的a/d转换器,最小转换时间为80ns等。
逆变电路使用的是三菱公司的ipm模块,该智能功率模块采用第5代igbt工艺,内置优化后的栅级驱动和保护电路,以不可思议的超小型体积,输出功率强劲的三相波形。它具有以下突出性能:
完整的功率输出电路,直接连接负载;
内置栅极驱动电路;
短路保护;
驱动电压欠压保护;
采用第五代低功耗igbt管芯;
超小型体积,仅重65g。
数字伺服系统的控制策略
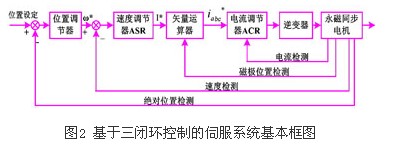
数字伺服系统一般是由三个闭环来完成。其原理如图2所示,第一层是位置环、第二层是速度环、第三层是电流环;其中位置、速度都是外环,而电流环则是系统内的内环,它的构成是由核心硬件以及关键解算软件组成的,全数字伺服系统是数控机床的核心传动部分,也是技术难度最大的部分,其最主要的特点就是高速、高精、功能丰富多样。电流环是伺服系统的核心控制环,而保证速度精度以及力矩平稳性的最关键就是数字伺服中的电流环的设计,所以一个系统性能是否优秀与电流环的设计息息相关。
lem传感器与电流采样电路方案设计
因为采样的精度和速度直接导致整个电流环的运算精度,从而直接对系统的性能产生非常重大的影响。而在电量参数测量领域内,作为首屈一指的领导厂商莱姆(lem)公司的霍尔电流传感器由于其稳定可靠的产品性能成为本系统设计的首眩型号为lts25-np。此款传感器采用的是单电源供电,相对于采用双电源供电的传感器(见图3),莱姆传感器在外围的硬件电路设计上更加简单,不需要增加电压抬升电路(双电源供电的传感器必须增加电压抬升电路使负电压转换为正电压后才能进入dsp)从而减少电源对系统的干扰。此款传感器另一优点是温漂小,精度高;而且内置采样电阻,其输出端是电压型输出,避免了因增加外接采样电阻以及运放后进入dsp使精度
- 基于Motionchip的无刷直流电机伺服控制系统设计(01-04)
- 简易伺服控制电路(06-02)
- 毫欧姆电阻在汽车电子系统中的应用(05-11)
- 新型放大器实现高性能电流检测(08-18)
- 模拟乘法器提高高边电流检测的测量精度(09-22)
- 低边与高边电流检测(04-15)