MEMS传感器在先进移动设备中的应用
其中:
ACC_bias … 加速度计长期偏差稳定性,单位:mg;g = 9.81m/s2
T … 双重积分周期,单位:秒
PE_ACC … ACC_bias造成的位置误差;单位:米。
陀螺仪的位置误差:
 (2)
(2)
其中:
g … 地球重力,9.81m/s2
GYRO_bias … 陀螺仪长期偏差稳定性,单位:rad/s
T … 双重积分周期,单位:秒
PE_ACC … GYRO_bias造成的位置误差;单位:米。
以上两个方程式可用于计算典型惯性传感器的性能和长期偏差稳定性引起的水平位置误差。当惯性传感器与GPS集成在一起时,这些误差不会随时间推移而扩大,其它引起位置误差的因素,如失匹、非线性和温度影响,也应在计算中给予考虑。
最近在MEMS制程上取得的进步让 MEMS加速度计和陀螺仪能够连续地提供更高的定位性能,使商用级的产品更加接近战术级产品的性能。在较短的时间如1分钟内,独立的加速度计和陀螺仪可取得相对较高的测量精度。当GPS信号受阻时,这对于GPS/SINS一体化导航系统很有用。
对于消费电子产品,室内行人航位推算系统5%的行进距离误差通常是可以接受的。例如,当一个人走过100米的距离时,定位误差应该在5米范围内。这要求航向误差在 ±2°到±5°之间[2]。例如,如果航位误差是2°,当一个人走过100米的距离时,定位误差应该在3.5米范围内 [= 2*100m*sin(2°/2)]。
此外,MEMS压力传感器能够测量相对于海平面的绝对气压。因此,MEMS传感器可以确定手机用户在海平面以下 600米到海平面以上 9000米之间的高度,辅助GPS的高度测量[2]。图3所示是利用MEMS传感器与GPS接收器的行人航位推算系统结构图。
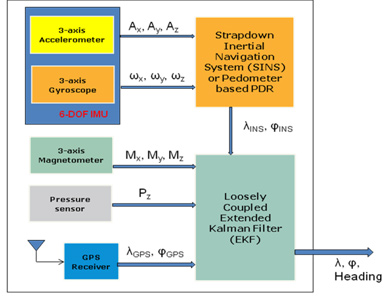
图 3: 移动设备行人航位推算系统结构图
3.MEMS传感器整合
传感器整合是一套数字滤波算法,用于修正每个独立传感器的缺陷,然后输出精确的响应快速的动态的(俯仰/滚转/偏航)姿态测量结果。传感器整合的目的是把每个传感器的测量数据作为输入数据,然后应用数字过滤算法对输入数据进行相互修正,最后输出精确的响应快速的动态的姿态测量结果。因此,航向或方位不受环境磁干扰的影响,没有陀螺仪的零偏漂移问题。
能够修正倾斜度的数字罗盘是由一个3轴加速度计和一个3轴磁力计组成,可提供以地球北极为参考的航向信息。但是这个航向信息容易受到环境磁力的干扰。如果安装一个3轴陀螺仪,开发一个9轴传感器整合解决方案,则可以随时随地保持精确的航向信息。
在设计一个使用多个MEMS传感器的系统时,了解下表所列的每个MEMS传感器的优缺点是很重要的。
•加速度计:在静态或慢速运动状态下可用于倾斜度修正型数字罗盘;可用于计步器的检测功能,检测步行人当前的状态是静止还是运动。不过,当系统在3D空间静止时,加速度计无法区分真正的线性加速度与地球重力,而且容易受到震动和振荡的影响。
•陀螺仪:可以连续提供从系统载体坐标到局部地球水平坐标的旋转矩阵,当磁力计受到干扰时,陀螺仪可辅助数字罗盘计算航向数据。长时间的零偏漂移导致无限制的姿态和定位错误。
•磁力计:可计算以地球北极为参考方向的绝对航向,并且可用于校准陀螺仪的灵敏度,但容量受到环境磁场的干扰。
•压力传感器:在室内导航时,压力传感器可告诉你身处哪一楼层,辅助GPS计算高度;当GPS信号变弱时,辅助GPS提高定位精度,但是容易受到气流和天气状况的影响。
基于以上各方面考虑,卡尔曼滤波器是最常用的整合不同的传感器输入信息的数学方法。这种方法权衡不同的传感器的作用,给性能最高的方面最高权数,因此,与基于单一媒介的导航系统相比,卡尔曼滤波器算法的估算结果更精确可靠 [3]。
目前基于四元数的扩展型卡尔曼滤波器(EKF)是一个很受欢迎的传感器整合方案,因为四元数只有4个元素,而旋转矩阵有9个元素,此外,四元数法还避免了旋转矩阵的特殊问题 [3]。
4.结论
随时随地精确定位是增强实境等先进移动应用面临的主要挑战,因为增强实境与行人航位推算(PDR)或定位服务(LBS)的关系密切。鉴于GPS接收器的接收限制,MEMS传感器对室内行人航位推算应用很有吸引力,因为这些传感器大多数已经出现在智能手机内。
要想取得5%的室内行人航位推算定位误差,需要开发MEMS传感器整合算法,以修正每个传感器的缺陷,使这些传感器实现优势互补。随着MEMS传感器的性能不断提高,在不远的将来,与用户无关的SINS/GPS一体化导航系统将会成为智能手机的标准配置。
- MEMS传感器前景广阔 剖析其3大应用领域(04-02)
- ADI:用高效MEMS开启民用无人机新纪元(04-15)
- USB 3.0为移动设备带来超快的连接速度(07-06)
- 2G至3.5G蜂窝移动设备的高效RF功率管理(04-12)
- 富士通研发出一种世界最小最薄手掌静脉传感器(06-11)
- 移动设备营收乏力 赛普拉斯看淡Q3、Q4业绩预期(12-21)