H.264编码器中亚像素运动估计的硬件实现
1 分像素运动矢量
一般在实际应用中,运动估计普遍采用分级搜索算法:首先在搜索区内找到最佳整像素运动矢量,再在整像素最佳匹配点下寻找最佳1/2匹配点,得到半像素精度的运动矢量,接着在该半像素精度最佳匹配点周围进行1/4像素点搜索,得到1/4像素精度最佳匹配点以及相应的运动矢量。由于分像素运动估计运算量大,很多学者对分像素运动估计从算法上进行优化,提出了很多快速搜索算法,减少搜索点数目以达到降低运算复杂度的目的。本文就是基于这个目的,在块匹配算法的基础上,提出了一种1/4像素精度的亚像素运动估计的硬件实现方法。在整像素运动估计的基础上用10×10整像素阵列实现半像素精度和1/4像素精度的最佳匹配点搜索,在空间上具有更高的并行度,硬件实现简洁有效。
FME的运动矢量
帧间编码宏块中的每个块或亚宏块分割区域都是根据参考帧中同尺寸的区域预测得到的,它们之间的关系用运动矢量来表示。H.264对亮度成分和色度成分进行亚像素搜索时,两者之间的运动矢量是有差异的,对亮度成分采用1/4像素精度,色度成分采用1/8像素精度。
假定点H是在整像素运动估计中找到的最佳匹配点,在此基础上再进行1/2像素点的搜索,如点(bb,aa等),如果MV的垂直和水平分量为整数,参考块相应像素实际存在;如果其中一个或两个为分数,则参考块相应的亮度和色度像素并不存在,需利用邻近已编码点进行内插而得。
内插像素生成的步骤如下:
首先生成参考图象亮度成分的半像素点。半像素点(如b、h、m)通过对相应整像素点进行6抽头滤波得出,权重为(1/32、-5/32、5/8、5/8、-5/32、1/32)。b通过下式计算得出:
b=round((E-5F=20G+20H-5I+J)/32) (1)
类似的,h由A、C、G、M、R、T滤波得出。一旦邻近(垂直或水平方向)整像素点的所有像素都计算出来,剩余的半像素点便可通过对6个垂直或水平方向的半像素点滤波得到。例如,j由cc、dd、h、m、ee、ff滤波得出。
半像素点计算出来后,在此基础上,1/4像素点可通过线性内插得出,如图2所示。
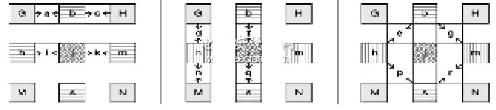
图2 亮度1/4像素内插
1/4像素点(如a、c、i、k、d、f、n、q)由邻近像素内插而得,如
a=round((G+b)/2) (2)
剩余1/4像素点(p,r)由一对对角半像素点线性内插得出,如e由b和h获得。相应地,对于色度成分的1/8像素精度的运动矢量,也同样通过整像素点线性内插得出,如图3所示。

图3 色度1/8像素内插
其中:
a=round([(8-dx)(8-dy)A+dx(8-dy)B+(8-dx)dyC+dx dyD]/64) (3)
FME模块算法原理及硬件实现
在本设计中,FME搜索采用的是如图4所示的菱形全搜索方法。
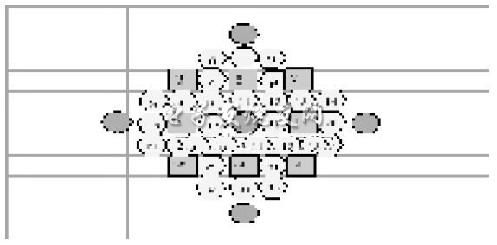
图4 菱形全搜索
即先利用整像素运动估计搜索出最佳整像素点,再在最佳整像素匹配点的基础上搜索出最佳整像素点周围的36个亚像素点(假设在图5中正中心点是最佳整像素匹配点)。等36个亚像素点都计算出来后,加上正中心的最佳整像素点共37个像素点。比较这37个像素点的SATD的值,将SATD值最小的像素点确定为最佳的预测点。
由于H.264采用树形结构运动估计,每个宏块可划分成更小的子块,其中4×4块是宏块划分中最小的子块,任何类型的子块都可由若干个具有相同运动矢量的4×4块组成,因此本设计在硬件实现时将4×4块作为处理的基本单位。考虑到硬件资源的节省及计算的并行度,在本设计模块中每次能并行处理两个4×4块的亚像素点的搜索,一个宏块(16×16)要分8次完成。
其中IME单元为FME单元提供10×10整像素点阵列,内插法用于1/2像素点的插值,ave单元用于计算1/4像素精度的像素点,Sram单元用于存储计算出来的亚像素点的值。比较器单元由diff、DCT、satd三个单元组成,用于比较这些亚像素的SATD值,确定最佳的亚像素预测值。
假设当前处理的4×4块在参考帧中的最佳整像素匹配块(4×4块为匹配的块),在硬件实现的过程中为减少搜索次数,只要搜索出图5中对应的5×5块的每个整像素点左上角的15个亚像素点(,然后将相邻整像素点左上角的亚像素点进行组合后就能将当前处理的4×4块中每个整像素点周围的36个亚像素点都计算出来。
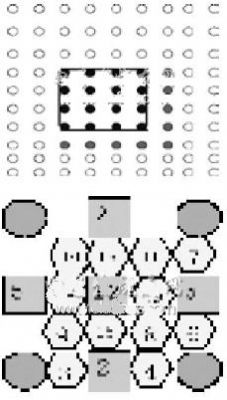
图5 最佳整像素匹配块
本设计在硬件实现的过程中为提高计算的并行度,利用15个六抽头滤波器,25个均值器等硬件资源来计算图8所示的亚像素点的值,计算依据分别如公式1、2所示,硬件搜索计算过程如图6所示。
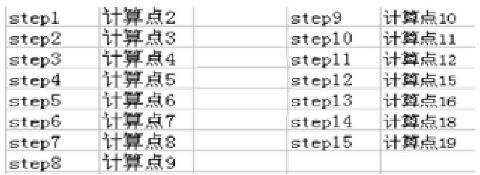
图6 亚像素点硬件搜索步骤
通过上述15个步骤就可将图8所示的亚像素点全部计算出来,并将计算出来的亚像素点的值都存入到开辟的Sram中,以便在进行P
- 光电编码器在电机控制中的应用(03-02)
- 支持热调节和输入过压保护功能的安全增强型线性锂电池充电器(08-16)
- 编码器元件及其应用(03-18)
- 可区分粗细的自适应旋转编码器设计(11-12)
- 旋转编码器在线速度检测控制中的应用(11-17)
- 旋转编码器安装方案(12-21)