基于电流间接控制的STATCOM系统仿真研究
随着工业化进程的加速,对电能质量要求也日益严格,如何提高现代电力系统可靠性、可控性、快速性已成为亟待解决的问题。静止同步补偿器(Static Synchronous Compensator,STATCOM)是柔性交流输电系统(FACTS)的重要设备之一,在稳定系统电压、提高功率因数、增加传送容量等方面发挥着重要的作用,代表着无功补偿技术的发展方向。STATCOM主电路架构不同、控制策略不同的对应着不同的补偿效果和成本。
1 STATCOM工作原理简述
采用STATCOM进行补偿无功具有连续调节范围大、控制响应精准快、运行经济可靠等优点。其工作原理图如图1所示。STATCOM主电路由逆变器和直流侧电容构成,经变压器接入电力系统。在理想情况下STATCOM装置等效为"可控电压源",设其输出电压为UI,系统电压为US,两者同相位。当UI>US时,电流从系统流向STATCOM且电流相位超前系统电压90。,装置输出感性无功;反之,当UI稳态时,STATCOM从系统吸收的有功功率和无功功率的计算公式如下:

式中:US是系统电压;R是系统等效电阻;δ是系统电压和装置输出电压之间的相位差。当δ<0,Q<0吸收容性无功;当δ>0,Q>0吸收感性无功。通过调整δ,就可对STATCOM的无功功率进行连续调节。
2 STATCOM的间接电流控制策略
根据是否直接控制输出电流来分,STATCOM可分为电流直接控制和电流间接控制两种控制策略。间接电流控制是指对STATCOM装置中逆变器所产生的交流电压基波的相位和幅值的控制,以此来间接控制STATCOM交流侧电流。间接电流控制分为单δ控制和δ与θ配合控制。采用单δ控制时,虽然简单有效,但忽略了对θ的控制,使得直流侧电容电压稳定困难、损耗增加。在δ与θ配合控制中,δ角的控制用于无功功率控制,而对θ角进行控制可起到维持电容电压稳定的作用。因此可对无功功率控制采用逆系统非线性PI方法,对STATCOM直流侧电容电压采用传统的PI控制方法,两个控制环互相独立,互不干扰。
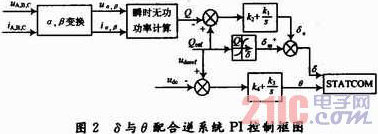
图2为δ与θ配合的逆系统PI控制框图。图中,三相瞬时电压uA,B,C和瞬时电流iA,B,C,经过α,β变换和瞬时无功功率计算得到补偿无功功率Q,并与参考补偿无功功率Qref进行比较,经过PI环节得到控制量δ,参考电压uref与直流侧电压udc进行比较,经过PI环节得到控制量θ,将控制量δ和θ作为控制参数输入STATCOM控制系统。
3 系统模型搭建及仿真结果分析
通过以上对STATCOM的原理和控制策略的分析,在此将在Matlab/Simulink环境下对其进行系统级的建模仿真。Matlab/Simulink被广泛应用于电力系统的建模和仿真中。
3.1 系统模型搭建
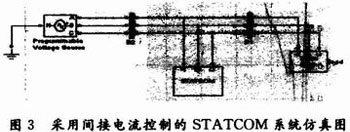
按照图3所示,在Matlab/Simulink中搭建基于间接电流控制的STATCOM的系统仿真模型。图中用无穷大系统电压的有效值为,频率为50Hz,额定负荷为S=9000+j9000。STATCOM的主电路48脉冲变流器(48 Pulses Inverter)组成。系统仿真可采取离散化处理来加快仿真速度,仿真步长设定为TS=2.5×10-5s。
3.2 仿真结果分析
仿真中,系统负荷为三相平衡负荷,因此可取A相电压和电流波形作为代表进行观察。图4为补偿前系统A相电压电流相位比较图。在图中,电压波形的幅值较电流波形的幅值大,电压相位超前电流相位90°。图5为系统补偿前的功率因数,其数值保持在0.707,与理论计算值相符合。

图6为补偿后系统A相电压电流相位比较图,电压和电流波形相位已基本趋于一致,因此可以获得较高的功率因数。

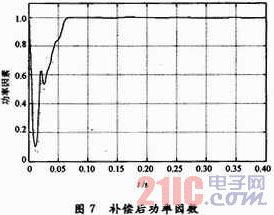
图7给出的系统补偿后功率因数曲线的也证明了这一点。因变流器直流侧电容需要进行充电,所以在起始阶段功率因数发生振荡,完成电容充电后振荡很快消失(在0.06秒附近),之后STATCOM进入稳态工作区,功率因数接近于1。
4 结语
本文对电流间接控制策略进行了分析,实现了基于电流间接控制方法的STATCOM的系统仿真,仿真结果验证了所建立模型的正确性和有效性。电流间接控制方法的优点在于结构相对简单,技术也比较成熟,但与电流直接控制方法相比,间接控制方法存在控制精度较低,电流响应速度较慢。应针对其优缺点做进一步研究,根据不同场合合理选择。
- 新型获取晶闸管电压过零信号的电路(09-13)
- 中低压配电网的无功补偿方式与优化(02-19)
- 电网无功补偿方案(01-13)
- ARC功率因数自动补偿控制仪的原理及其应用(02-01)
- 基于DSP的混合型有源电力滤波器设计(07-18)
- 智能无功补偿技术在农村电网的应用(08-27)