太阳能自动跟踪系统的设计方案
、串行口中断复位处理模块等。单片机主程序流程图如图6所示。
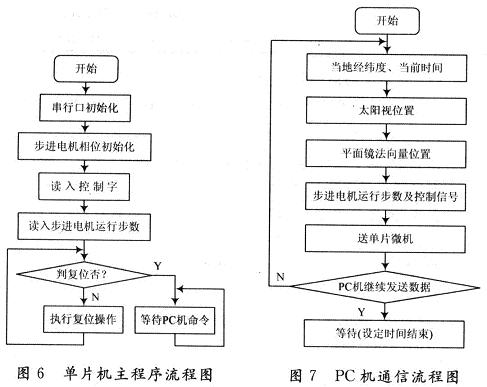
软件的另一部分为PC机部分,PC机软件部分主要是负责任意时刻太阳位置的计算并运用软件计算出当前状况下俯仰与水平方向步进电机运行的步数,并将数据送给跟踪系统驱动器。与单片机通信的部分使用VC++中的MSComm控件来编译串口通讯的应用程序,采用MSComm32.OCX控件。使用控件的属性进行串口设置,使用控件的事件驱动进行串口响应,使用控件的方法完成串行口接收和发送数据。PC机通信流程图如图7所示。
上位机控制系统具有实现复位、水平方位的调整,俯仰方向的调整,太阳位置的跟踪、手动校准及计算当日数据等功能。其中"设置"按钮,可进行地方经纬度、波特率、步进电机动作频率等的设置。上位机可执行程序控制界面如图8所示,图9所示的是控制主界面下"设置"按钮的对话框。
试验观察数据分析
由于影响跟踪精度的因素很多,不仅跟当地纬度、太阳赤纬角、太阳时角的取值有关,还跟步进电机的精度以及跟踪转台的机械结构有关,因而需要对跟踪轨迹的程序进行校正。校正采用手动操作,通过控制水平俯仰方位步进电机,使两个轴带动平面镜反光装置转动,同时不断观察平面镜反射太阳光的影子,当影子中心刚好聚在指定点时为最佳,记录下从原点到该点两轴的步进电机各自走过的步数,根据实际运行步数与理论运行步数之差,可计算得到角度之差,就是高度角和方位角的修正值。校正可以选择任一天中几个不同时刻进行。系统在实际运行时,观察到太阳在正午至下午3点期间,高度角方位角变化曲线存在明显拐点,变化比较显著,在此期间内系统对太阳位置的跟踪存在误差。
表1中列出了2009年1月12日中午至下午三时左右的理论数据,并用系统的手动校准功能,记录下不同时刻的步进电机实际运行步数。
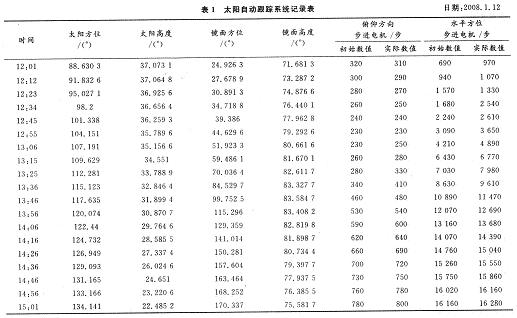
为了更准确地得到太阳实际位置的参数修正值,应在春夏秋冬四季中不同时刻分别观测记录数据,将得到的一组高度角和方位角的校正值,拟合其曲线。用校正系数校正理论值存入控制程序,可以提高跟踪精度。
本文介绍的太阳自动跟踪装置可以有效地提高太阳能利用率,适用于各种需要跟踪太阳的装置。经过试验、测试和实际使用,各项指标均达到了设计要求。本文设计的太阳自动跟踪装置是基于视日运动规律,为使系统具有更高的跟踪精度,可采用光电传感器跟踪校正,构成由视日运动规律跟踪和传感器跟踪的混合跟踪系统。随着太阳能自动跟踪装置的广泛应用,它定会有助于提高绿色能源利用的进程,为环境保护和提高人民的生活质量做出更大的贡献。
- 为太阳能灯供电的低损耗电路的设计(01-22)
- 什么是光伏效应?(01-19)
- 21世纪的绿色能源—太阳电池(01-06)
- 利用太阳能电池进行在线涓流充电的电路(01-09)
- 锂电池充电器设计技巧:从太阳能电池获取更大功率(02-19)
- 基于MPPT的智能太阳能充电系统研究(03-21)