基于A3967SLB的步进电机细分驱动系统设计
步进电机精度高,惯性小,在不失步的情况下没有步距误差积累,特别适用于数字控制的定位系统。传统的细分驱动电路由细分环行分配器、放大器和合成器等部分组成。这种电路应用复杂,灵活性差。本文利用a3967slb作为步进电机微控芯片,简化了步进电机的控制实现。由于单片机资源没有pc丰富,人机界面也没有pc友好,因此,本文采用了主从式结构,即pc用于管理,单片机用于执行。
由a3967slb构成步进电机的驱动部分
a3967slb是美国allegro公司生产的pwm恒流控制微步距驱动二相步进电机专用驱动器。它的工作电压可达30v,驱动电流达750ma,一个a3967slb即可驱动一台二相步进电机,可实现8细分驱动。芯片内部的pwm电流控制电路可通过加在pfd的电压设置为慢、快、混合三种电流衰减模式,如果pfd端的电压高于0.6vdd,则选择慢衰减方式。若低于0.21vdd,则选择快衰减模式。处于两者之间为混合衰减模式。另外,a3967slb还能提供完善的保护措施,包括抑制瞬态电压,过热保护、防止电流直通、欠电压自锁等功能。
a3967slb和微处理器之间不需要附加其他的接口电路,该芯片采用easy stepper接口,将8条控制线减少了2条(步长和方向),只要简单地输入控制步进电机的脉冲,其内嵌的转换器就可以实现对步进电机的控制。a3967slb还需要一些电阻、电容来调整其工作参数,整个驱动电路非常简单。
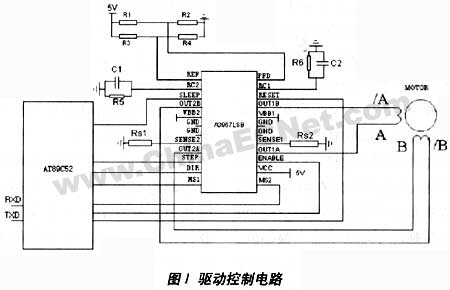
如图1所示,ms1和ms2是步进电机细分分辨率选择的逻辑输入口;dir是电机运转方向的选择口;reset用于重置芯片初始值,屏蔽所有外部输出;step为脉冲输入端口;out1a、out1b、out2a、out2b为h桥的两对输出端口;enable为使能端;sleep为睡眠模式;sense1、sense2为h桥的电流检测电阻;ref为参考电压;gnd为逻辑地和电源地;rc1、rc2为h桥固定截止时间模拟输入。最大限流imax是由取样电阻rs和取样比较器的输入参考电压vref决定的:
imax=vref/8rs
at89c52具有8kb flash,256b内部ram,32个i/o口线,3个16位定时/记数器,一个6向量两级中断系统,一个全双工串行通信接口,同时片内还有振荡器和时钟电路。使用很方便。在这个系统中,单片机主要用来产生控制脉冲并与上位机进行串行通信。
通信电路
在最简单的rs-232直接传送通信系统中,只要发送和接受双方同时准备好,仅用信号发送端(txd)、信号接收端(rxd)和信号地(gnd)3根信号线就可以进行通信;若以应答方式进行数据通信,可使用请求发送(rts)、清除发送(cts)或数据终端准备(dtr)、数据装置准备(dsr)4个信号进行硬件握手。在at89c52单片机系统中,分别从p3.0和p3.1引出串口线rxd和txd,通过专用的电平转换芯片转换成rs-232接口标准的电平,这样,二者之间就可以通过rs-232接口进行数字信号的传送。单片机可以通过直接传送或应答握手的方式与主机进行数据通信,但由于握手方式占用其它端口,而单片机的端口数量有限,所以,计算机与单片机的通信常采用直接传送的方式。通信电路如图2所示。

软件设计
软件部分的设计主要包括下位机按mcu的接收程序、脉冲控制程序以及上位机的串口发送程序。上位机与下位机之间进行数据通信。上位机的程序主要通过windows可视化编程vc++实现。
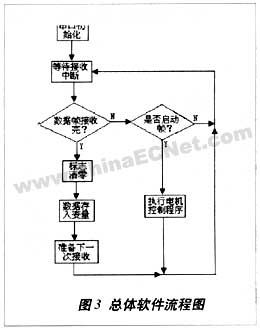
下位机程序主要负责接受pc发来的数据,按照要求产生控制脉冲,具体流程为:首先对要使用的串口进行初始化,然后p2输出口清零,接着进入住程序的死循环,等待中断触发。接收一个字节的数据,ri=1,接着将ri清零。当单片机接收完数据后,标志位置1。将缓存中的数据存入控制的变量中,以便控制时使用(具体操作时先法数据帧再发启动帧)。软件控制流程如图3所示。
结语
结合以上介绍的基于a3967slb的步进电机控制系统,在vc++环境下,利用mscomm控件实现了pc与单片机之间的串行通信。实验结果表明,用这种方式实现上位机对基于a3967slb的步进电机的控制系统进行精确的驱动可行有效。
本系统中,利用pc的丰富软硬件资源和强大的系统功能,可进行一些数据处理、显示等工作;而从控制器at89c52则用于实时控制。另外,该系统为开放式结构,便于系统升级。
- 步进电机驱动器的关键技术研究(11-20)
- PSoC3 双轴步进电机细分控制(03-21)
- 基于ATMEGA48单片机的仪表步进电机的细分控制原理及应用(06-16)
- 卫星便携站天线自动对星系统的设计与实现(06-16)
- 用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 设计更简易、多选择性的逆变稳压器电路方案(11-23)