用于办公自动化设备应用的高能效步进电机驱动器方案
电机的应用非常广泛,遍及人们工作及生活的各个领域,如打印机、复印机、传真机、投影仪、电冰箱、洗衣机、空调、燃气灶、照相机、ATM机、电动缝纫机、保安摄像机、自动售货机、热水供应系统、园林灌溉系统及工业自动化等。
在节能越来越受重视的当今,高能效的驱动电机显得尤为重要。从类型上看,电机包括交流电机、直流有刷电机、直流无刷电机、永磁同步电机、伺服电机和步进电机等。其中,步进电机采用脉冲工作,也称作数字电机或脉冲电机。步进电机的旋转角与脉冲数量成正比,速度则与脉冲频率成正比,可通过控制脉冲数量来精确控制步进电机的旋转,使其非常适合于定位应用。本文将探讨步进电机驱动的常见挑战,并重点介绍安森美半导体针对办公自动化设备应用的高能效步进电机驱动器方案。
步进电机驱动应用的常见挑战
电机驱动器能用于多种不同的应用。设计工程师在设计中使用电机驱动器时面对一些共通的挑战。首先,当今的大多数设计都要求电机驱动应用及相关电机驱动IC和元件提供低能耗和高能效。例如,在如果风扇驱动器电路板位于密封壳体内部,就会产生热量,要求额外的能耗来将它冷却。因此,就需要使用内置风扇在内部环流冷风,以减少热量并管理散热。故工程师可能会要求低功率损耗,同时还要求强大、具备高能效冷却功能的电机。

图1. 电机驱动器应用示例及其常见挑战。
其次,从终端用户角度来讲,极需要降低电机产生的噪声,以避免造成不适的感觉。设计人员还必须能够补偿系统中的任何外部噪声或振动。再次,无论是因为居住空间有限或是用户偏好,消费者对紧凑型方案的需求高是一项普通的消费趋势。这趋势导致更小尺寸及低噪声的电机更受偏好,但这在尝试补偿其它设计要求时并不总是具有可能性。
值得注意的是,由于要求高压电源来驱动白家电及工业等应用,电机及电机驱动器的耐用性及安全性至关重要。更不用说工程师需要选择能够精确控制速度的可靠电机。
永磁型和混合型步进电机的工作原理
步进电机常用于精密控制应用,并采用像微步进的技术来减轻电机振动。图2显示了永磁型步进电机及混合型步进电机的工作原理图解。步进电机以数字脉冲形式工作,通常称作同步电机或脉冲电机。步进电机通过导通及关闭MOSFET来控制转动。
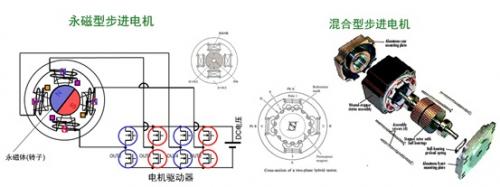
图2. 永磁型及混合型步进电机的工作原理。
以图2左侧为例,当电流流过MOSFET开关OUT1和OUT2时,永磁转子的位置如左图所示。控制OUT1、2、3及4的电流,就可以控制转子位置。转角与脉冲数量成正比,转速与脉冲的频率成正比。您可以藉控制脉冲数量来精密地控制转子位置,使其适合于定位。
用于办公自动化设备应用的步进电机及驱动器产品
如前所述,步进电机的应用非常广泛,如在ATM自动柜员机中用于进钞控制及存折卷入等功能,又如在自动售卖机中用于货品移动,以及在老虎机中用于轮盘旋转等。本文讨论的重点是针对办公自动化应用的步进电机及驱动器,典型产品有如打印机及扫描仪。通常情况下,进纸、纸托盘及扫描等功能可能使用到步进电机,用于位置控制。

图3:步进电机及驱动器在常见办公自动化设备中的应用示例。
如图3所示,步进电机精确地将纸从A点移到B点。如果终端用户的首要要求是静音驱动,那么就适宜采用低振动的微步步进电机。在这类应用中,步进电机及直流无刷电机用于将墨带压到纸上。要求采用步进电机来在需要定位的地方调节墨带对纸的压力。而在台式扫描仪等设备中,设计人员选择具备定位功能、低振动及电机旋转控制范围的电机
推动高能效创新的安森美半导体提供宽广阵容的电机驱动器产品,用于各种典型电机应用。表1列出的仅是安森美半导体用于打印机等应用的电机驱动器产品(除了步进电机,也包含无刷直流电机及直流有刷电机),供设计人员造型参考。

表1:安森美半导体用于打印机等常见办公自动化设备的电机驱动器产品概览。
LV8702高能效步进电机驱动器的特性、优势及应用示例
目前,多种电子产品中使用的步进电机能效较低,成为业界关注的一项焦点,也为电源系统设计工程师带来了挑战。安森美半导体推出的LV8702高能效步进电机驱动IC克服这些挑战,提供独特的驱动系统,帮助节省电机的空载能耗,且提供多重应用优势。
LV8702的供电电压VM范围为9至32 V,最大支持36 V;输出电流为2.5 A,并支持3 A的峰值电流。这器件的输出导通阻抗仅为0.55 Ω,帮助高能效驱动步进电机。LV8702内置高能效模式、失步检测功能及输出短路保护功能,帮助降低电机驱动能耗,减少发热量,减轻振动及噪声,并提供高可靠性。LV8702的典型应用包括复印机、文档扫描仪、多功能打印机等办公自动化设备,以及缝纫机等工为设备和老虎机等娱乐设备。
- 移动电话和PDA应用中LED照明驱动电路的设计方法(04-16)
- 移动电话、PDA应用中LED照明驱动电路的设计(05-08)
- NCP1014非隔离线路的应用解决方案(05-18)
- 160W CRT-TV电源设计指南(06-27)
- 安森美半导体高效电源管理技术助力节能环保(10-15)
- 小型LCD背光的LED驱动电路设计考虑因素(01-18)