基于HLA的自行高炮CGF的研究与设计
个重要组成部分,它通过一定的协议把分布在模拟器中的个体联入同一个虚拟战场环境中实现综合仿真。通过对人类作战行为足够的建模,这些实体能不需要人为的交互而自动地对仿真战场环境中的事件和状态做出反应。基于HLA的某自行高炮武器系统模拟训练平台是采用HLA的技术、体制和思想构建起来的先进仿真训练环境,它主要完成高炮的战法演练、日常训练、装备论证等任务。高炮CGF是某自行高炮武器模拟训练系统中的一个联邦成员,其本身也作为一个独立的联邦,能为受训人员提供交战对手或援军的主要兵力实体,其模型的准确性、有效性、真实性将直接关系到高炮作战模拟训练的效果。由上可知,构建基于HLA的高炮CGF对整个仿真系统科学、有效地运行具有重要的意义。
1 高炮CGF的设计思想及原则
1.1 设计思想
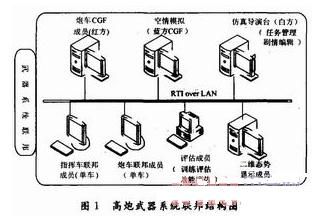
由上可知,高炮CGF是作为一个联邦成员加入高炮武器系统模拟训练平台的,如图1所示,需要说明的是,高炮CGF本身也是一个联邦,它也有自己的联邦成员,本文所研究的就是高炮CGF作为联邦其本身的构建过程。按照联邦开发执行过程(Federation Development and Execution Process,FEDEP),根据明确的联邦开发目标来开发联邦概念模型(Federation Conceptual Model,FCM)。高炮CGF联邦的开发目标是建立一个能够在高炮武器系统模拟训练平台中为受训人员提供交战援军的智能高炮兵力实体,它不仅具有构建各种不同类型和功能的高炮的重用能力,更重要的是通过给定不同的初始化数据可快速重构出高炮作战训练所需要的具有不同层次的指挥决策能力和战术行为的仿真智能高炮。
1.2 设计原则
高炮CGF实体采用简化的动态模型,具有节省时间、充分体现对象外在特性、模型易于机动控制的特点。高炮CGF必须符合HLA所提出的联邦成员规则,才能与HLA兼容。HLA为联邦和联邦成员提出了必须遵循的10条规则,其中联邦成员规则有5条,分别为:每个联邦成员必须具有一个符合HLA OMT规范的仿真对象模型(Simulation Object Model,SOM);每个联邦成员必须能够更新或反射其在SOM中说明的任何属性、发送和接受SOM中说明的交互实例;在联邦运行过程中,联邦成员应能动态转移或接受在它的SOM中说明的对象属性所有权;联邦成员应能改变其SOM中规定的更新属性值的条件(例如阈值);联邦成员应该能管理局部时间,从而允许它和联邦中的其他成员协调数据交换。
HLA主要由规则(Rules)、对象模型模板(OMT,Object Model Template)和接口规范(Interface Specification)3部分组成。在HLA中将仿真应用与底层的通信和分布仿真基本功能相分离,由运行时间框架(Run Time Infrastructure,RTI)提供的服务来实现底层的通信和基本功能,即在一个联邦的执行过程中,所有的联邦成员按照HLA的接口规范说明所要求的方式同RTI进行数据交换,实现成员间的互操作。高炮CG-F、联邦通过向RTI请求服务的方式完成某些操作,并及时更新对象实例的属性和交互类属性。
2 高炮CGF系统的仿真模型
通用CGF系统中的模型主要有3种,即物理行为模型、智能行为模型和环境模型,只有正确地建立这3种模型,最后所得到的CGF对象才是可信的。高炮CGF实体一般行为是指高炮在战场中的物理行为,中间包含了智能行为的实现,智能行为模型建立在物理模型之上,在通过物理模型获取感知和命令的基础上,经过推理产生决策,并通过物理模型实施决策、产生效应,作用于战场环境。如高炮实体在虚拟战场环境中的机动、侦查、开火,射弹散布,以及高炮分队路径规划、队形变换、火控运用等聚合级行为。根据某自行高炮的战斗行为,将高炮CGF的实体模型进行分类,如图2所示。
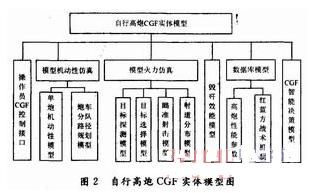
高炮攻防对抗过程可看成是由一系列离散一连续事件和活动组成,该CGF系统主要由CGF操作员接口和5大模型组成,即机动模型、火控模型、毁歼效能评判模型、数据库模型和智能决策模型。
(1)机动模型。主要包括进攻过程中单炮机动模型,分队作战的路径规划模型。
(2)火控运用模型。主要包括目标探测模型,目标选择模型,瞄准射击模型,射道分布模型。
(3)评判模型。主要包括红蓝双方的毁伤结果,并进行相关的数据统计分析。
(4)数据库模型。主要包括双方参战的性能参数,红蓝方的战术机制,高炮的位置、配置地域等情况。
(5)智能决策模型。智能决策模型设计是建模的关键环节,主要采用人工智能技术来进行智能决策模型的建立。
3 高炮CGF智能决策模型的实现方案
CGF的研究重点在于实体行为,尤其是智能行为的实现。目前,实现CGF的智能行为主要采用人工智能技术。高炮CGF行为模型中的智能决策模块将由物理模型传来的信息根据知识库进行决策,模块内部由2大部分组成:接口模块和决策模块。其中接口模块由接收属性模块、发布交互模块组成。决策模块分为决策器模块、数据库管理模块、战术控制规则数据库和历史信息库模块。决策模块采用人工神经网络的智能算法实现,决策过程为:决策机制接收当前环境的状态信息,结合炮车的自身状态,参照任务目标做出决策,产生动作控制信息。在高炮CGF系统中,先用模糊逻辑的方法对当前态势进行分类,判断所采用战术规则的类别,再根据规则库实施战术决策,并对当选战术进行动作规划,再将决策结果作为控制信息传回给物理模型实体。在智能决策过程中,需要考虑当前状态数据与规则条件的匹配、规则的搜索、冲突消解、匹配失败的处理等问题,同时还要考虑智能决策的实时性问题。实时决策是指在决策过程中,当某规则最适合当前态势时,能够迅速启用该规则,充分抓住战机;而当所有规则都不适合当前态势时,要尽快结束本次决策过程,以便随时迅速进入下一轮决策,决策流程如图3所示。